

Hybrid-power unmanned aerial vehicle with four auxiliary wings and control method thereof
A technology of hybrid power and unmanned aerial vehicles, which is applied in the direction of rotorcraft, power plant type, unmanned aircraft, etc., can solve the problems of limited endurance, large power consumption, and difficult manipulation, so as to improve endurance and improve The effect of flexibility and long battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
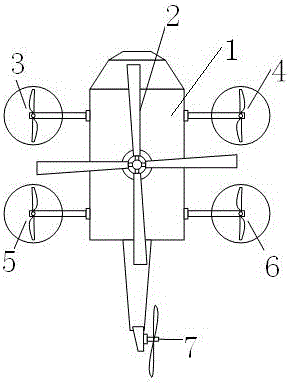
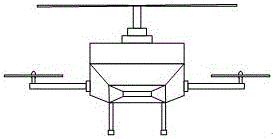
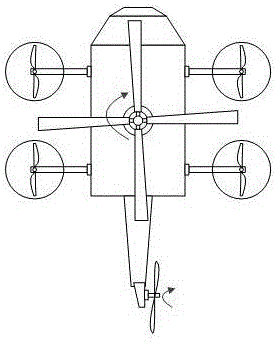
[0036] A hybrid unmanned aerial vehicle with four auxiliary wings, which includes a body, a main rotor, a vertical tail, and four auxiliary rotors; the main rotor is arranged on the upper part of the body, two auxiliary rotors are arranged on both sides of the body, and a vertical tail is arranged on the tail of the body. Tail, the above four auxiliary rotors include left front auxiliary rotor, right front auxiliary rotor, left rear auxiliary rotor and right rear auxiliary rotor. , the right front auxiliary rotor and the left rear auxiliary rotor are reverse propulsion.
[0037] The vertical tail adopts blades with fixed pitch, and the same main rotor also adopts blades with fixed pitch.
[0038]The main rotor is powered by an internal combustion engine, and the vertical tail and four auxiliary rotors are powered by an electric motor.
[0039] The specific analysis of the flight control of this embodiment:
[0040] (1) When the UAV climbs vertically: the main rotor increases...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More