

Moving target tracking method based on progressive unscented Kalman
An unscented Kalman and moving target technology, applied in the field of moving target tracking for nonlinear measurement, can solve problems such as poor robustness, improve tracking accuracy and robustness, ensure stability, and ensure computational complexity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
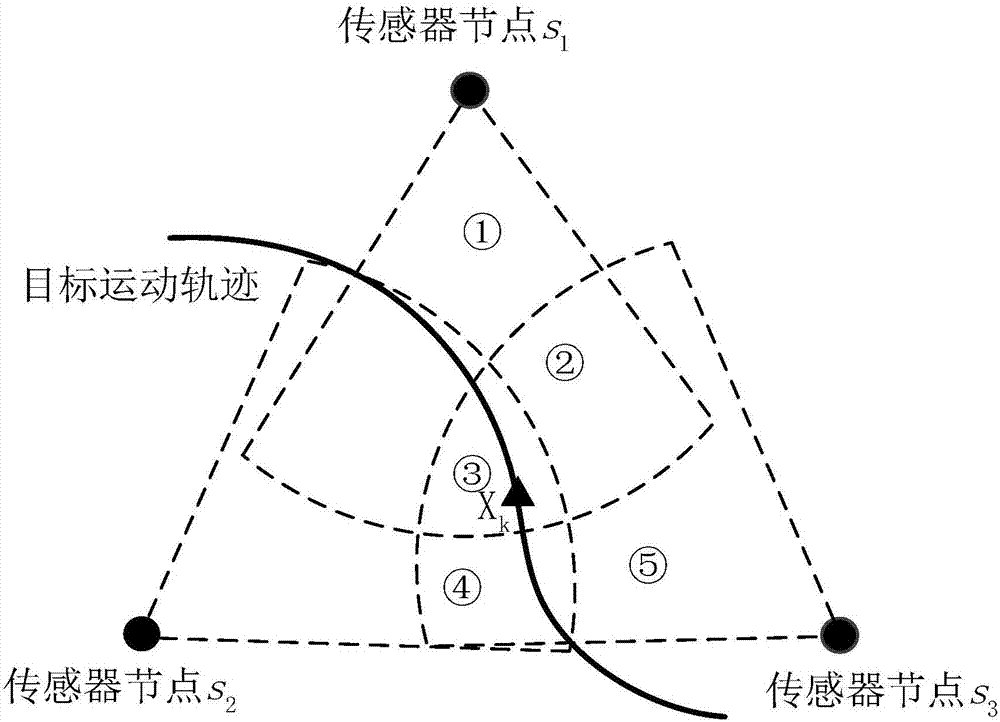
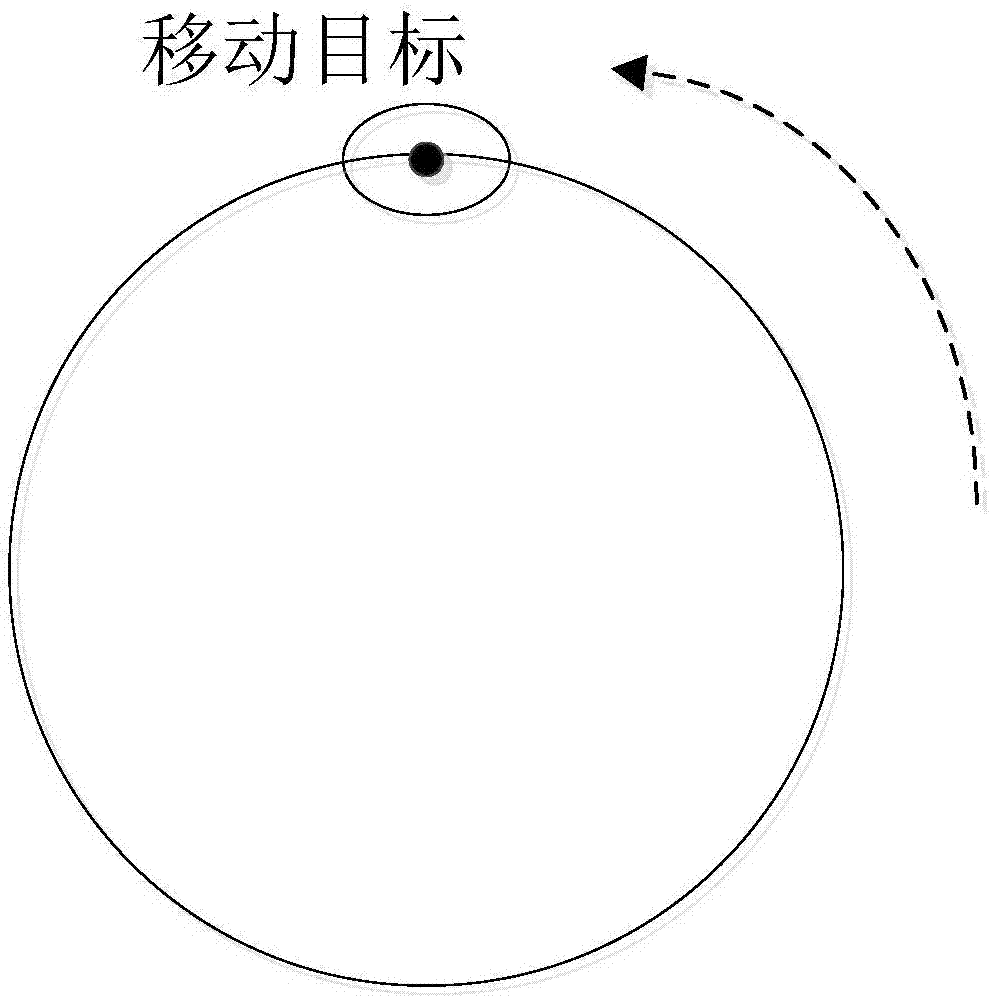
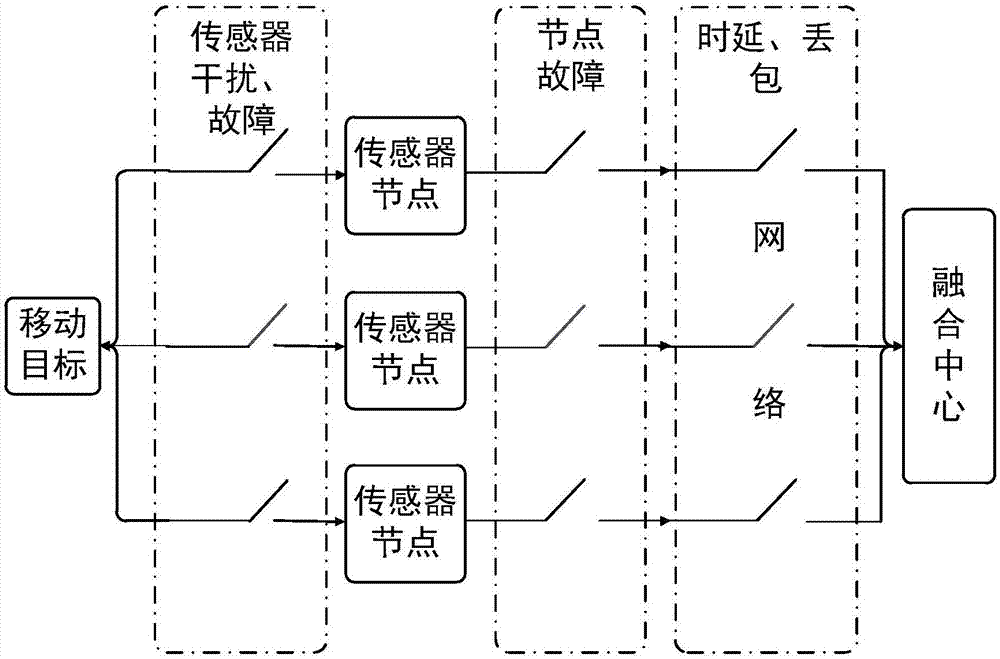
[0020] refer to Figure 1 ~ Figure 4 , a moving target tracking method based on asymptotically unscented Kalman, such as figure 1 As shown, the simulation tracks the target in a wireless sensor environment composed of three ranging sensors. In the wireless sensor environment, the moving target moves in a circle along a fixed trajectory, and the trajectory is as follows: figure 2 shown. The structure diagram of the multi-sensor fusion system of the target tracking system is as follows: image 3 shown. The state space model of the mobile robot target tracking system is shown in equations (1) and (2):
[0021]
[0022]
[0023] Among them, the target state vector x k and y k are the positions of the moving target on the x-axis and y-axis at time k, respectively, is the direction of the moving target at time k. r and V are the radius of the moving target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More