

Driverless vehicle simulation test method
An unmanned vehicle, unmanned driving technology, applied in the field of automobiles, can solve the problem of not supporting the simulation test of the automatic driving scheme
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
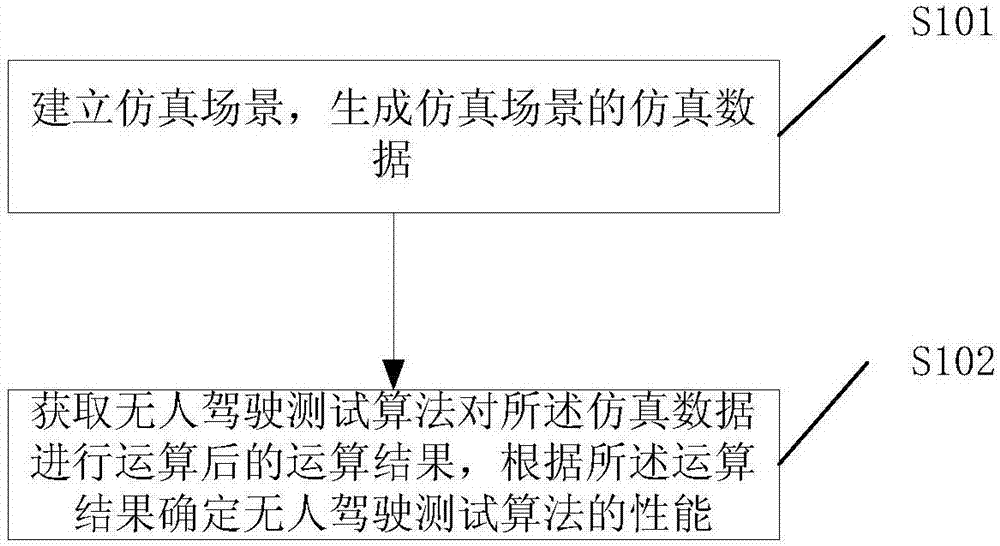
[0042] Such as figure 1 Shown is a working flow chart of a simulation test method for unmanned vehicles provided by an embodiment of the present invention, including:
[0043] Step S101, establishing a simulation scene, and generating simulation data of the simulation scene;
[0044] Step S102, obtaining the operation result of the unmanned driving test algorithm on the simulation data, and determining the performance of the unmanned driving test algorithm according to the operation result.
[0045] Wherein, the simulation scene established in step S101 may include information such as roads, lane lines, traffic signs, etc. By establishing various test scenes, the car can complete the test of as many road scenes as possible under the simulator, and can provide The status information of all vehicles, traffic facilities, and pedestrians is used as simulation data.
[0046] In step S102, the unmanned driving test algorithm takes the simulation data in the simulation scene as the...
Embodiment 2
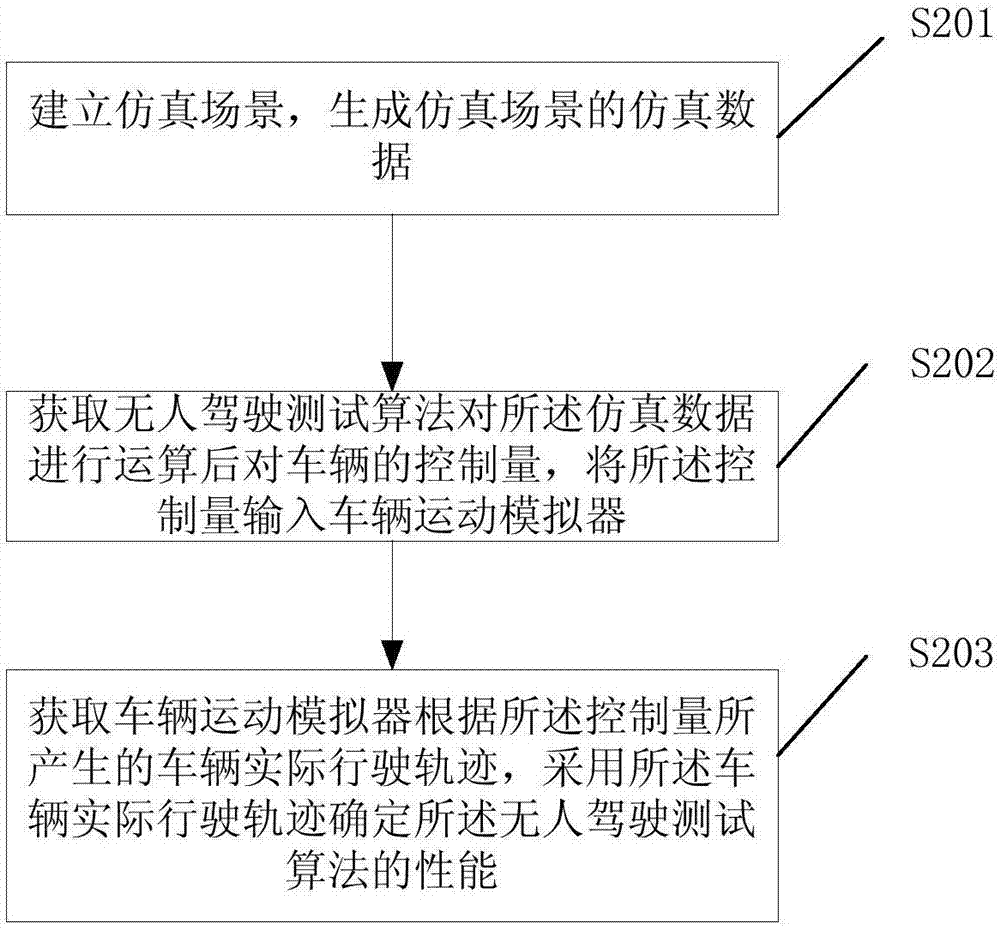
[0049] Such as figure 2 Shown is a work flow chart of a kind of unmanned vehicle simulation test method provided by the optional embodiment of the present invention, including:
[0050] Step S201, establishing a simulation scene, and generating simulation data of the simulation scene.
[0051] Step S202, obtaining the control amount of the vehicle after the unmanned driving test algorithm operates on the simulation data, and inputting the control amount into the vehicle motion simulator.
[0052] Specifically, the unmanned driving test algorithm includes a decision algorithm, a planning algorithm and a control algorithm, and the decision algorithm judges the vehicle driving behavior according to the obstacle information, traffic sign information and lane line information in the simulation data;
[0053] The planning algorithm performs vehicle driving path planning according to driving behavior;
[0054] The control algorithm determines the control amount required for the ve...
Embodiment 3
[0064] Such as Figure 4 Shown is a work flow diagram of a simulation test method for unmanned vehicles provided by another optional embodiment of the present invention, including:
[0065] Step S401, establishing a simulation scene, and generating simulation data of the simulation scene.
[0066] Step S402, the unmanned driving test algorithm includes a perception algorithm or a positioning algorithm, and acquires raw sensor data produced according to the simulation data.
[0067] Specifically, at least one control quantity is input to the vehicle motion simulator, so that the vehicle motion simulator simulates at least one driving state of the vehicle;
[0068] Acquiring raw sensor data produced according to the simulation data under the driving state.
[0069] Step S403, obtaining a sensing result after the sensing algorithm processes the sensor raw data, or obtaining a positioning result after the positioning algorithm processes the sensor raw data.
[0070] Step S404, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More