Clamping force-adjustable tangential driving type rotary inertial piezoelectric actuator and method
A piezoelectric actuator and driving technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, electrical components, generators/motors, etc. Inability to act, etc., to achieve the effect of infinite stroke, stable performance, and reliable clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
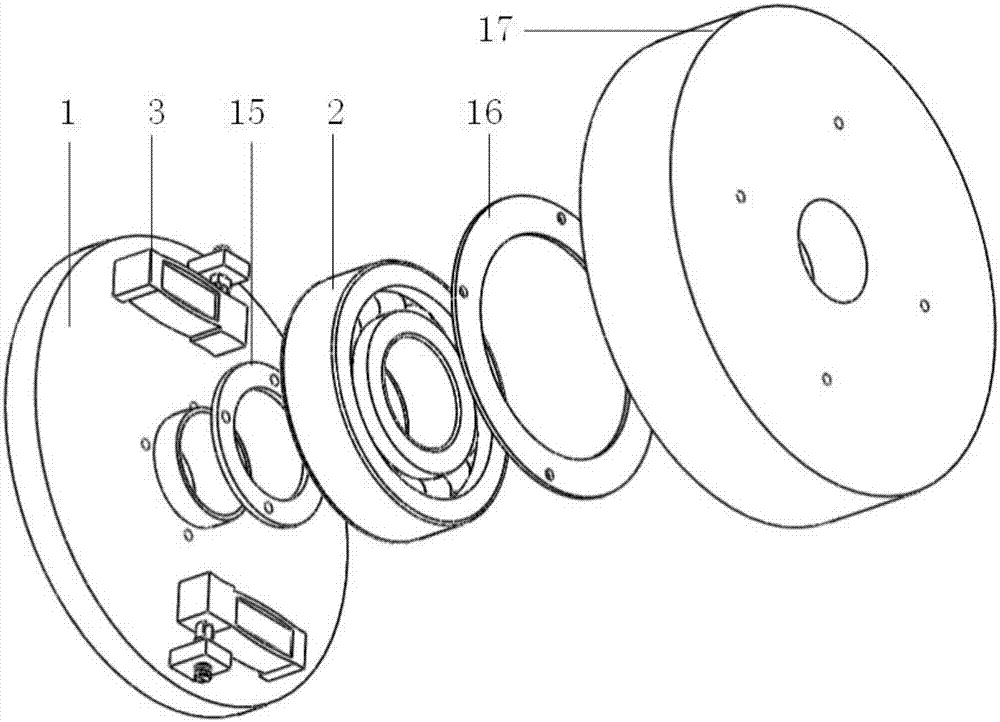
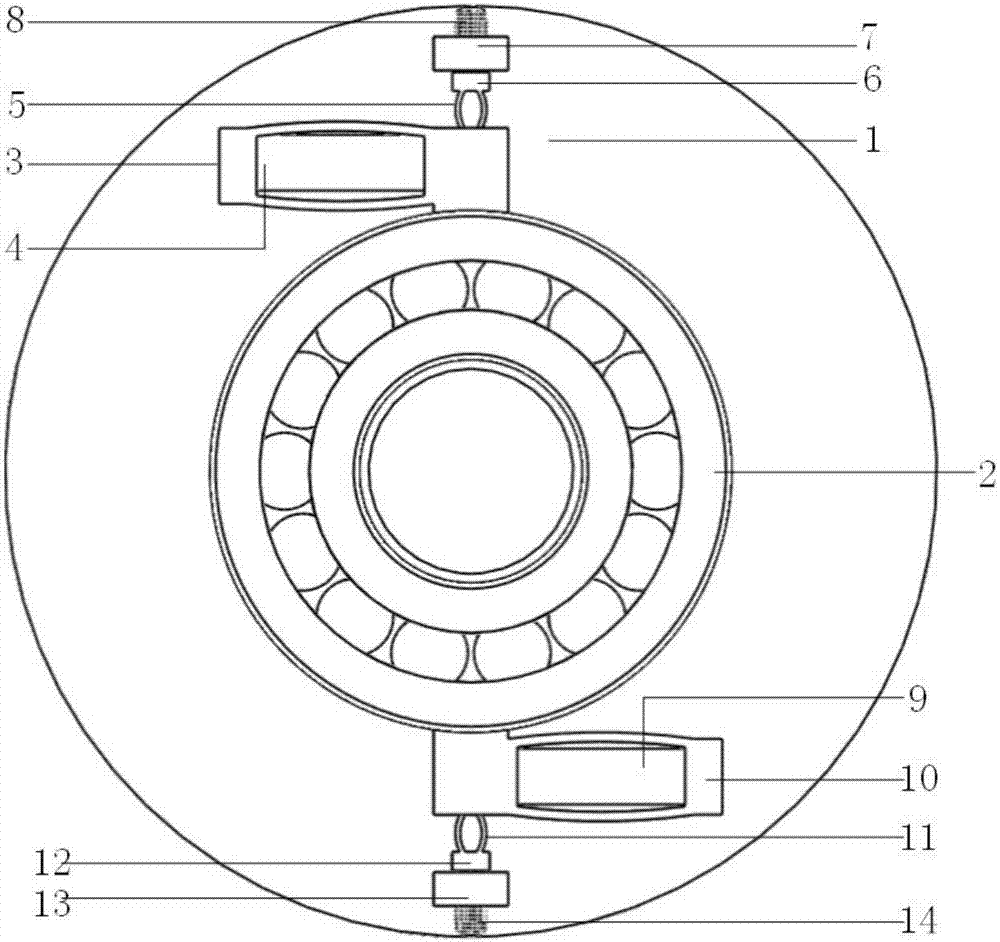
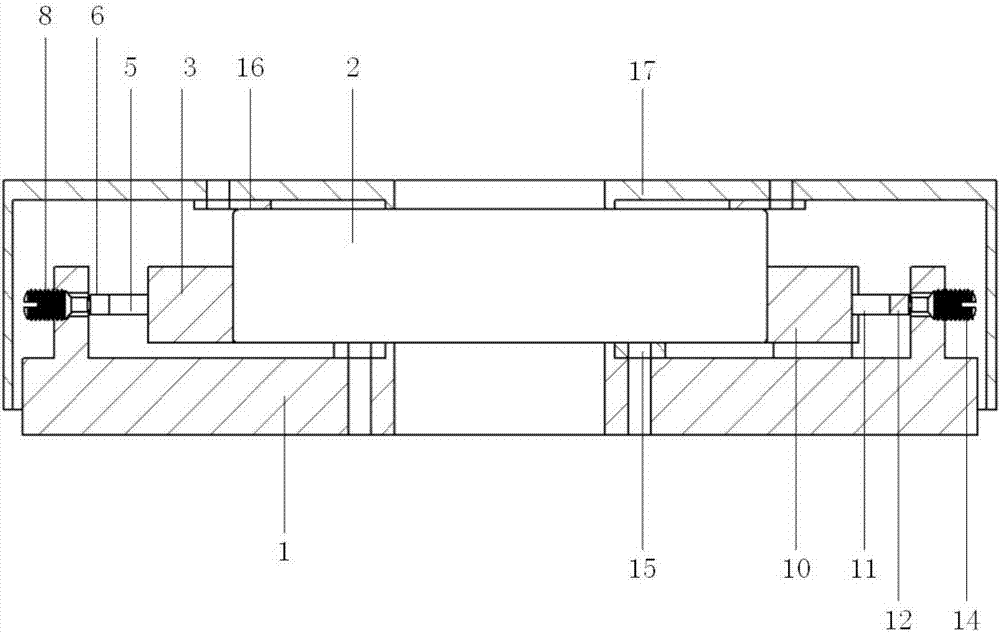
[0022] Such as figure 1 , figure 2 and image 3 As shown, the clamping force adjustable tangentially driven rotary inertial piezoelectric actuator of the present invention, the main parts include base 1, bearing 2, housing 17 and two anti-symmetrically arranged driving mechanisms, the whole structure has rotational symmetry The inside contains through holes; the inner ring gasket 15 is bonded to the inner ring of the bearing 2 and fixed to the base 1 by screws; the outer ring of the bearing 2 is bonded to the outer ring gasket 16, and the outer ring gasket 16 passes through The screw and the housing 17 are fixed; the two anti-symmetrically arranged driving mechanisms include the first rhombic ring 3 and the second rhombic ring 10 and the first compression rings respectively installed in the first rhombic ring 3 and the second rhomb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com