Novel industrial robot pipe fitting clamping device
An industrial robot and clamping device technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve problems such as difficult to control the center of gravity of pipe fittings, insufficient stability of pipe clamping, and complex design structures, etc., to achieve safe and reliable clamping , reduce the number, and work safely and reliably
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
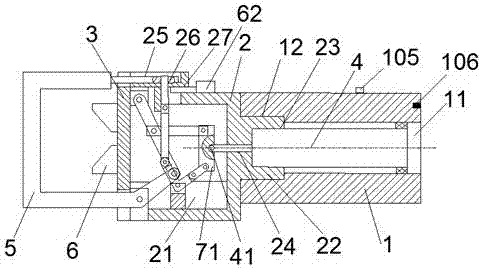
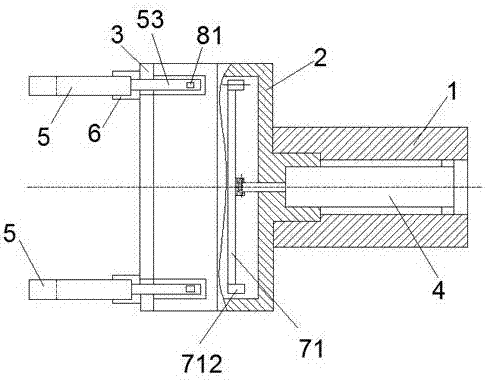
[0032] Such as Figure 1-Figure 12 As shown, a novel pipe clamping device for industrial robots of the present invention includes a joint 1 connected to the mechanical arm of the industrial robot, and a second joint 1 fixed at the left end of the joint 1 and provided with an opening to the left. The cavity 21, the upper surface is provided with a rectangular groove 25, and the seat body 2 with a long and narrow through groove 27 is provided on the right side of the second cavity 21 directly below the rectangular groove 25, and the seat body in the middle of the rectangular groove 25 2 is provided with a vertical rectangular hole 26, and a cover plate 3 fixedly installed at the left end of the seat body 2 and extending right into the second cavity 21, and two sets of connecting rod sets, and a driving cylinder 4, and two U-shaped mechanical claws 5, and an iron stop assembly installed on the upper surface of the seat body 2 on the right side of the narrow through slot 27, and tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com