

Cleaning robot and shortest path planning method based on cleaning robot
一种清洁机器人、最短路径的技术,应用在清洁机器人领域,能够解决存储空间消耗大、算法时间复杂度高、时间耗费过多等问题
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions in the embodiments of the present invention will be clearly described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
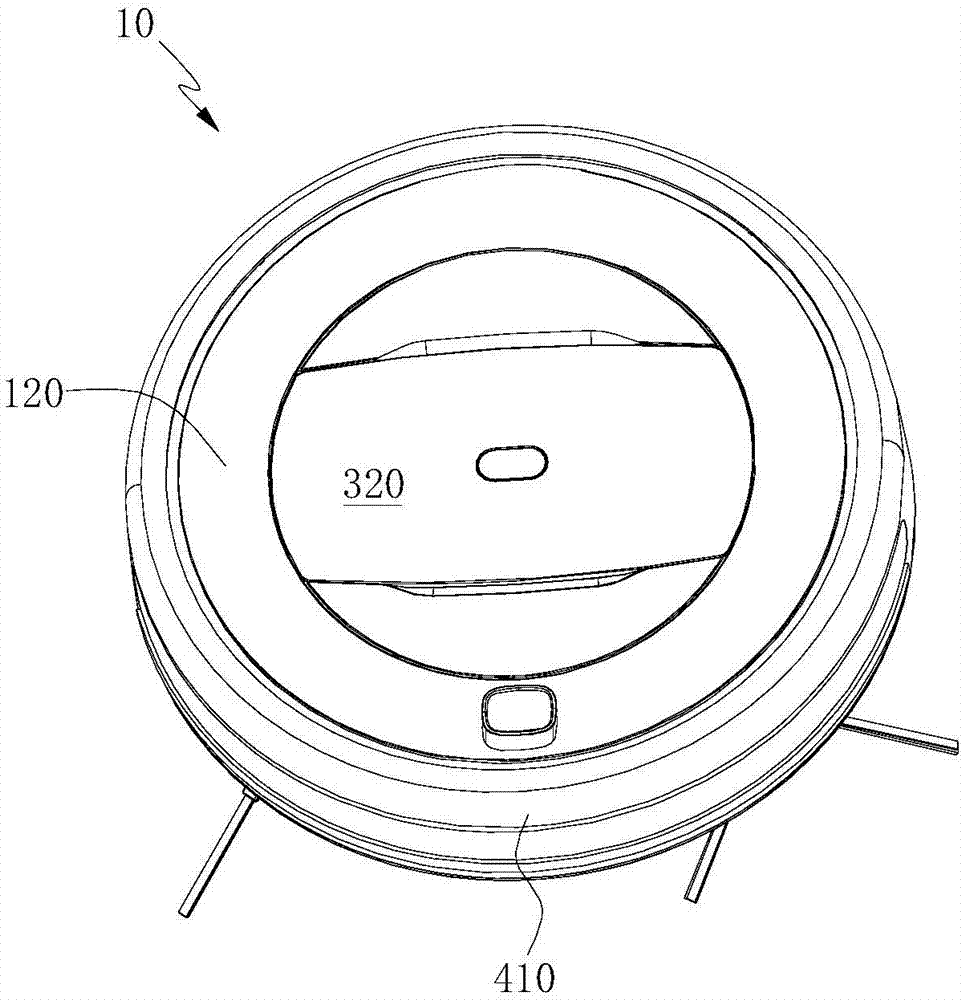
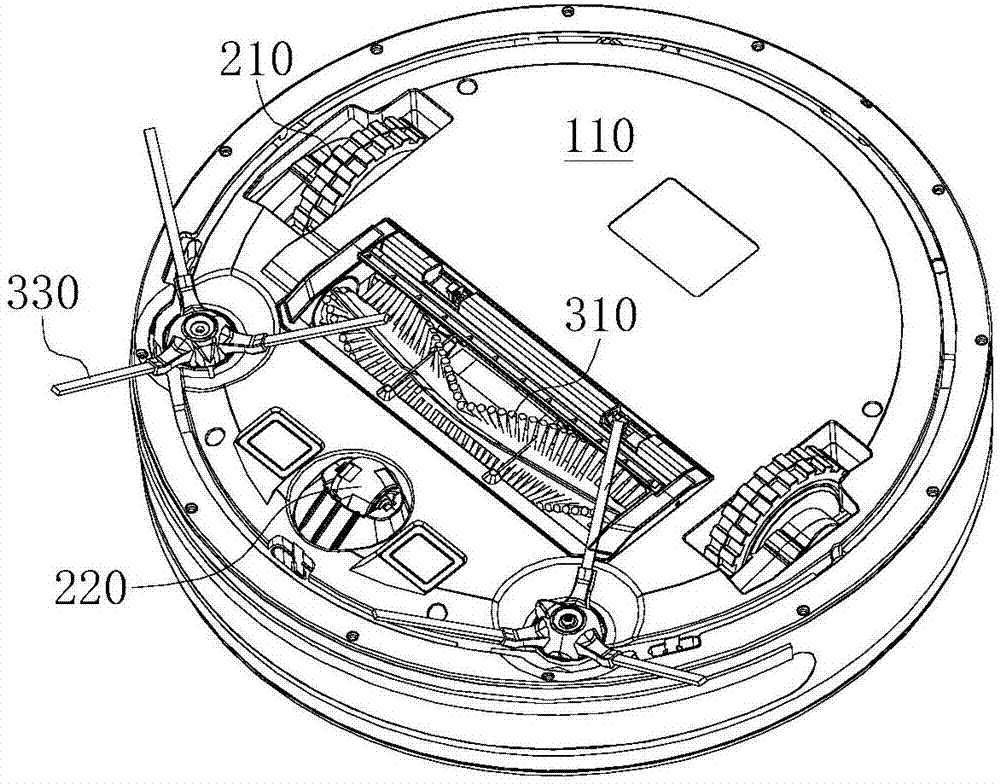
[0040] figure 1 is a schematic structural view of a cleaning robot according to an embodiment of the present invention, figure 2 yes figure 1 Schematic diagram of the bottom structure of the cleaning robot shown in .
[0041] refer to figure 1 and figure 2 In this embodiment of the present invention, the cleaning robot 10 is a sweeping robot as an example for illustration. In other optional embodiments, the cleaning robot 10 may also be a mopping robot, a vacuuming robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More