

Robotic navigation utilizing semantic mapping
A robot and container technology, applied in the field of robot navigation, can solve problems such as inefficiency, time-consuming, and time-increasing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
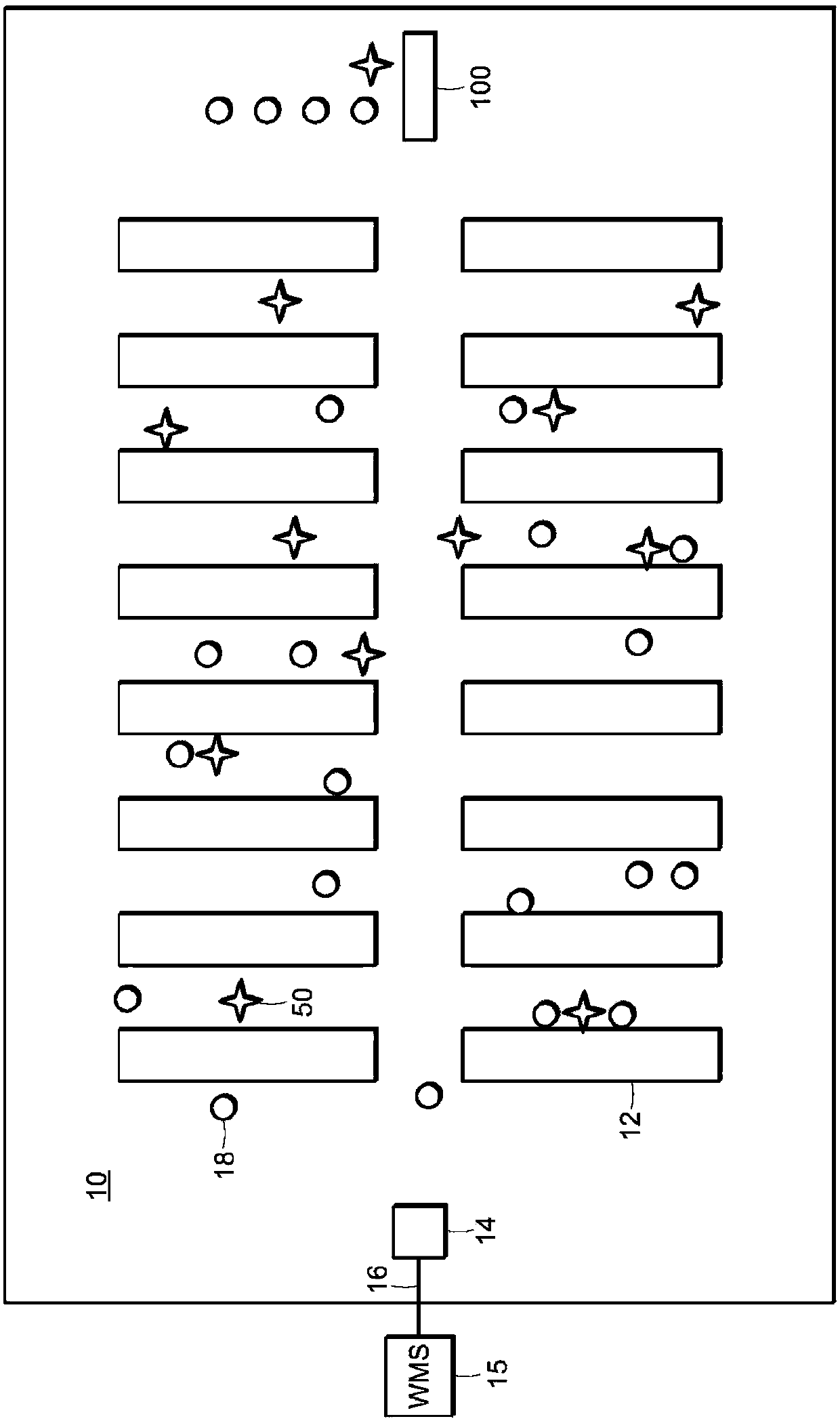
[0021] refer to figure 1 , a typical order fulfillment warehouse 10 includes shelves 12 filled with various items that may be included in an order 16 . In operation, an order 16 arrives at the order server 14 from the warehouse management server 15 . The order server 14 communicates the order 16 to a robot 18 selected from a plurality of robots roaming the warehouse 10 .
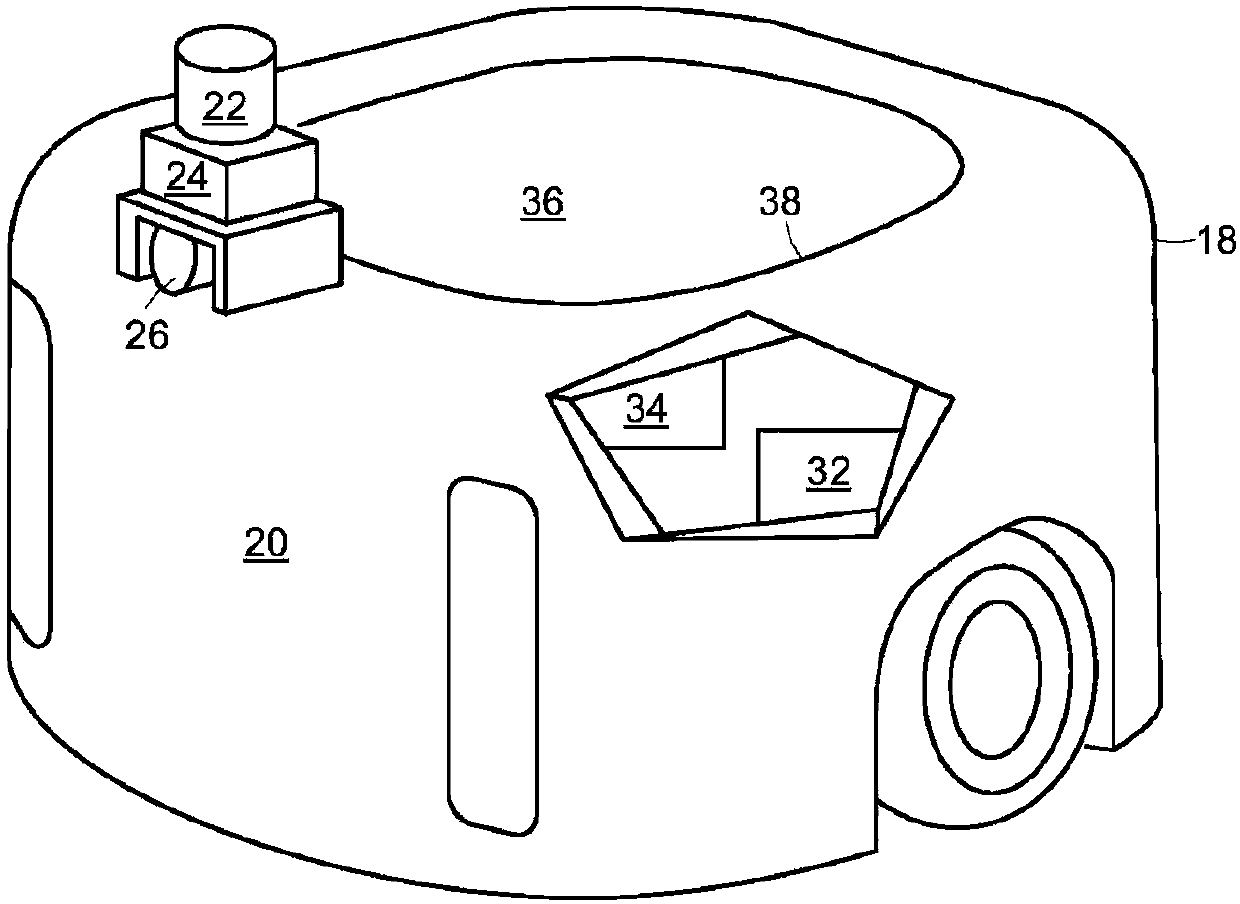
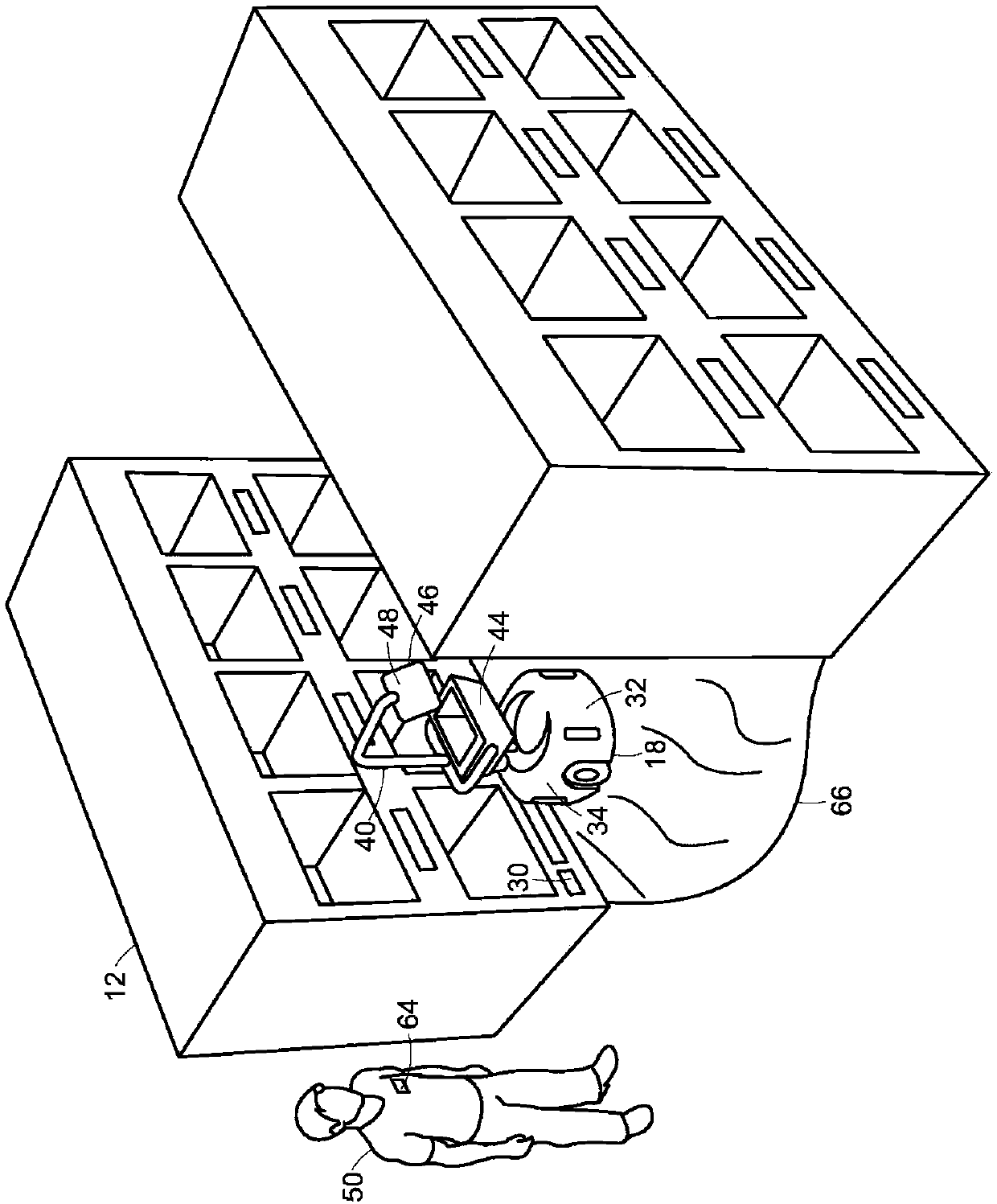
[0022] figure 2 A typical robot 18 shown in includes an autonomous wheeled base 20 with a lidar 22 . The base 20 also features a transceiver 24 that enables the robot 18 to receive instructions from the order server 14 and a camera 26 . Base 20 also features a processor 32 that receives data from lidar 22 and camera 26 to capture information representative of the robot's environment, and memory 34 that cooperates in performing various tasks associated with navigating within warehouse 10. Tasks and navigation are placed on the fiducial markers 30 on the shelves 12, such as image 3 shown in . A fiducia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More