
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic automobile driving method
A technology for automatic driving and automobiles, which is applied in motor vehicles, non-electric variable control, vehicle position/route/height control, etc., and can solve problems such as inability to track pseudo-random codes, inability to receive signals in underground tunnels, and low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] A method for automatic driving of a car, characterized in that: at least including information coding given along the ground advancing direction of the driving route, a sensing unit on the car that acquires the information coding given along the ground advancing direction of the driving route and acquiring information along the driving direction according to the sensing unit The information code given in the direction of the driving route on the ground controls the control unit for driving the car, and the control unit controls the driving of the car according to the information code given in the direction of the ground moving along the driving route acquired by the sensing unit.
Embodiment 2
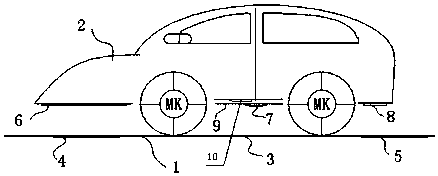
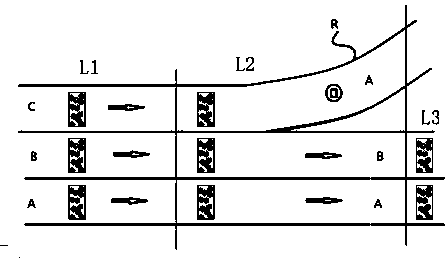
[0031] Such as figure 1 with figure 2 As shown, a method for automatic driving of a car, including the information coding two-dimensional code 3 given along the driving route ground 1 forward direction, including the image sensor 7 installed on the chassis 9 of the car 2, including reading the image sensor 7 to obtain the two-dimensional code 3 information control unit 10, the control unit 10 controls the car 2 to move forward along the driving route ground 1 according to the two-dimensional code 3 information acquired by the image sensor 7.
[0032] The information of the two-dimensional code 3 includes the direction of the driving route on the ground, the information on the curved direction of the route, the information on the curvature of the driving direction on the ground, the vehicle position information, the information on the ground lane of the driving route and information on adjacent lanes, the information on the driving route, and the speed of the vehicle on the dr...
Embodiment 3
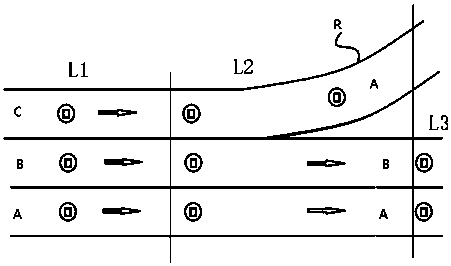
[0051] Such as figure 1 with image 3As shown, a method for automatic driving of a car, including a radio frequency IC4 for information coding given along the driving route ground 1 forward direction, including a radio frequency receiver 8 installed on the chassis 9 of the car 2, including reading the radio frequency receiver 8 to obtain information codes control unit 10, and the control unit 10 controls the car 2 to move forward along the driving route ground 1 according to the coded information read from the radio frequency IC4.
[0052] The information of the radio frequency IC4 includes the direction of the driving route on the ground, the information on the curved direction of the route, the information on the curvature of the driving direction on the ground, the vehicle position information, the information on the ground lane of the driving route and the adjacent lane information and the driving route information, and the speed limit of the driving route. information. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com