

Special double-degree-of-freedom flexible knee joint for humanoid robot
A technology of humanoid robot and degree of freedom, applied in the field of humanoid robot, can solve the problems of lack of flexibility, easy to be damaged by external impact, high stiffness of knee joint, etc., to eliminate rigid connection, increase motion stability, and increase telescopic flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
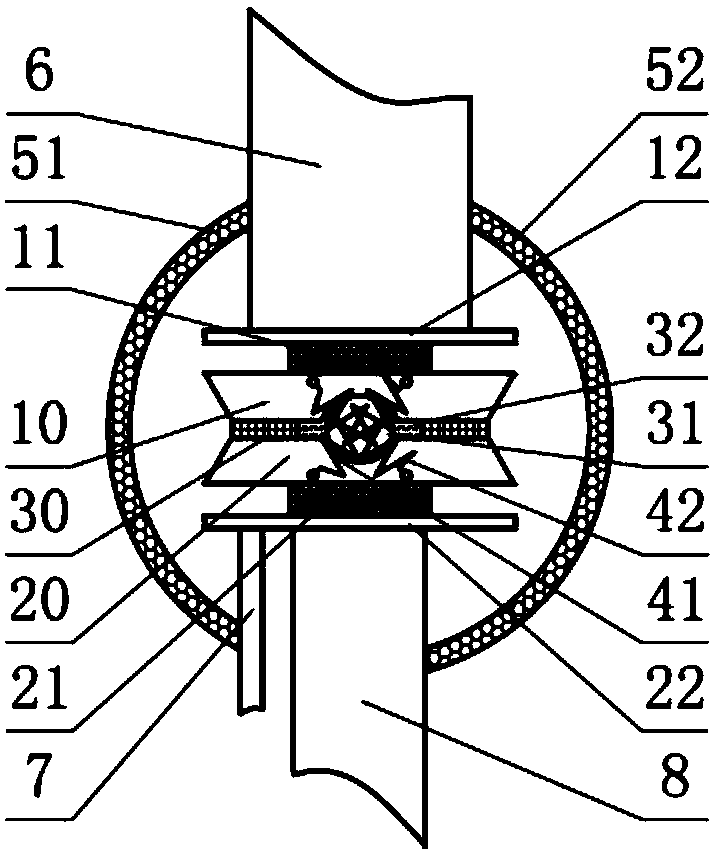
[0015] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0016] see figure 1 As shown, a special dual-degree-of-freedom flexible knee joint for a humanoid robot of the present invention includes a femoral half-joint composed of a joint shell A10, a flexible pad A11 and a uniform force plate A12, and a joint shell B20, a flexible pad B21 and a uniform joint The tibiofibular half-joint composed of the force plate B22 cross-connects the anterior cruciate ligament 41 and the posterior cruciate ligament 42 of the joint shell A10 and the joint shell B20, and connects the fibula spring 51 of the mechanical femur 6 and the mechanical fibula 7 at both ends. The tibial spring 52 connecting the mechanical femur 6 and the mechanical tibia 8 is installed in the flexible sealing ring 30 between the joint shell A10 and the joint shell B20; the joint shell A10 and the joint shell B20 have the same structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More