

Novel five-degree-of-freedom manipulator
A technology of degrees of freedom and manipulators, applied in the field of manipulators, can solve the problems of affecting the accuracy of clamping block movement, limiting the degree of freedom of manipulators, and high requirements for drive synchronization, achieving high motion stability and accuracy, high space utilization, and overall The effect of compact structure design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing:
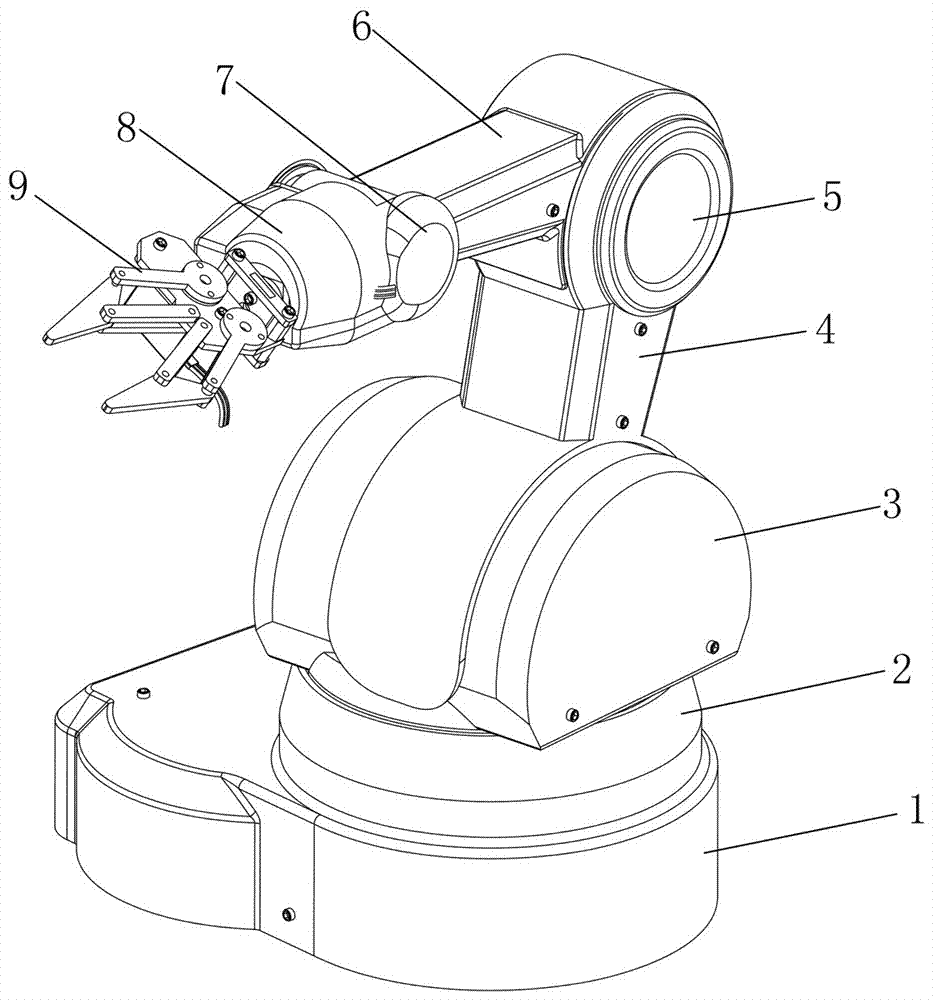
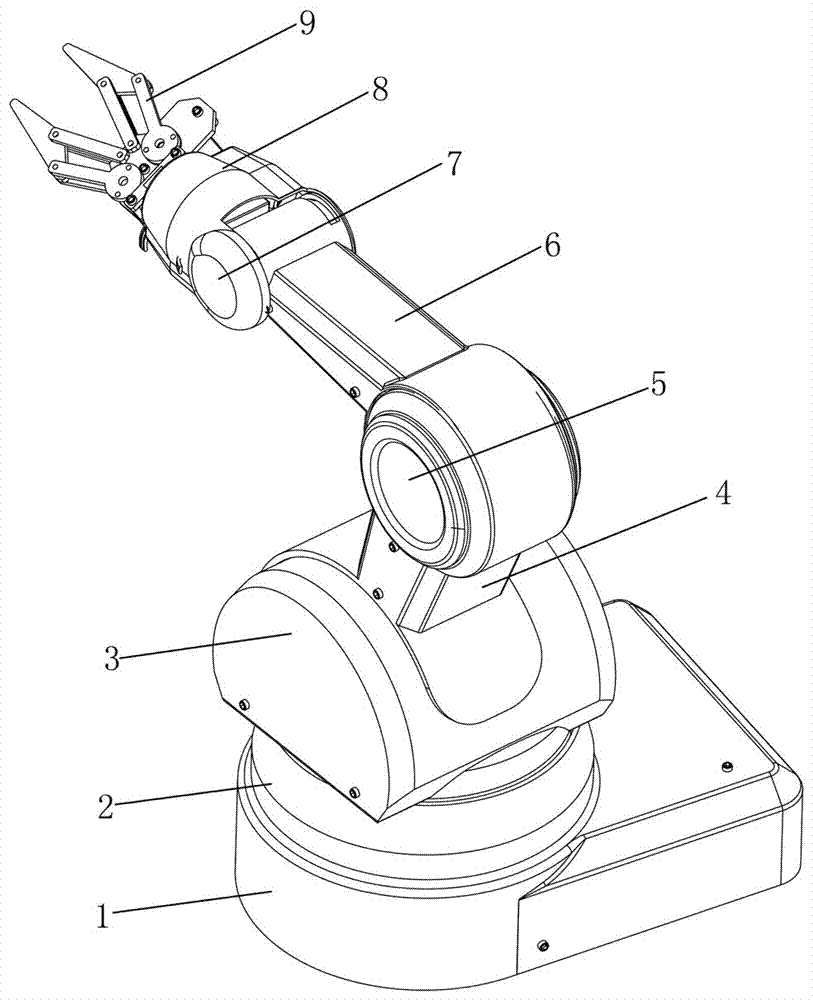
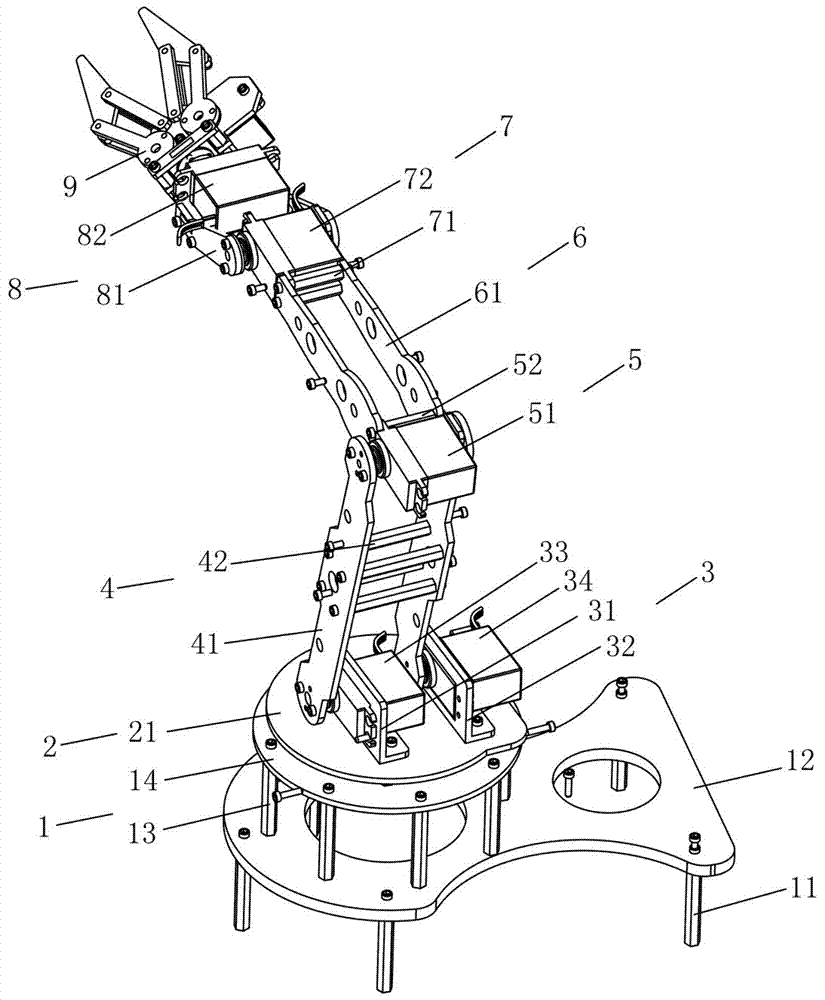
[0028] Such as Figure 1 to Figure 5 As shown, the technical solution adopted by the present invention is as follows: A novel five-degree-of-freedom manipulator includes a base 1, a rotating part 2, a first connecting part 3, a first shaft arm 4, a second connecting part 5, and a second shaft arm 6 , the third connecting part 7, the third shaft arm 8 and the jaw mechanism 9, wherein the above-mentioned base 1 is arranged on a horizontal plane, the rotating part 2 is arranged on the base 1, and rotates in the horizontal plane; the above-mentioned first connecting part 3 It is arranged on the rotating part 2 and rotates with the rotating part 2; the lower end of the above-mentioned first shaft arm 4 is rotatably connected to the first connecting part 3, and is driven to rotate by the first connecting part 3. The first shaft The upper end of the arm 4 is provided with a secon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More