

6-PSS parallel mechanism and position forward and inverse solution method
A 6-PSS, parallel technology, applied in the field of robots, can solve problems such as limiting the movement space of parallel robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0046] Parallel robots have the advantages of high rigidity, high bearing capacity, and easy position inversion, and are widely used in fields such as motion simulators and parallel machine tools that require high stiffness, high precision, or large loads without requiring a large working space.
[0047] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
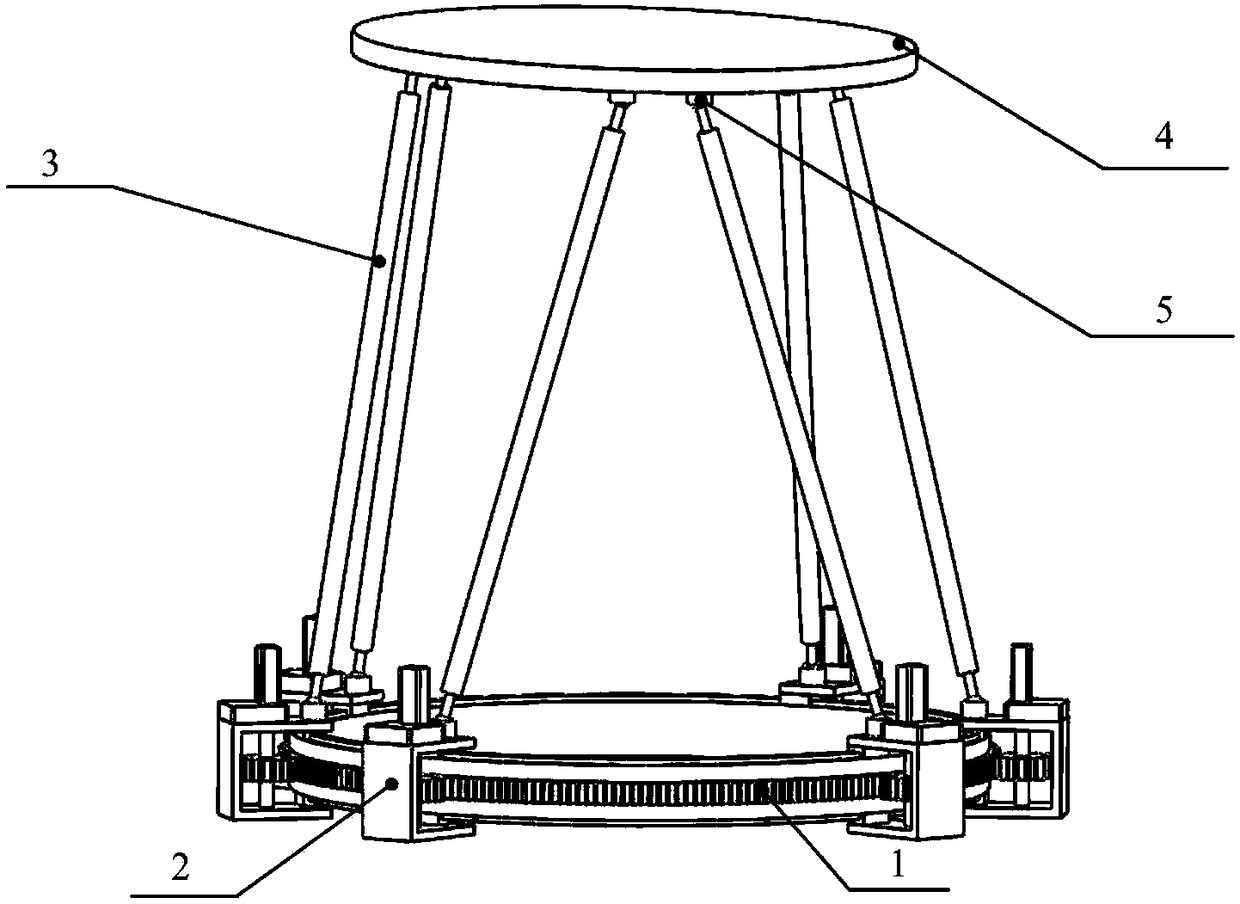
[0048] Such as figure 1 As shown, the 6-PSS parallel mechanism of the embodiment of the present invention includes: circular track 1, sliding module 2, connecting rod 3, motion platform 4, u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More