

A method for autonomous re-planning of UAV trajectory after remote control interruption
An unmanned aerial vehicle, re-planning technology, applied in the direction of control/regulation system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of inability to guarantee the safety of inorganic return flight, and achieve the effect of improving survivability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
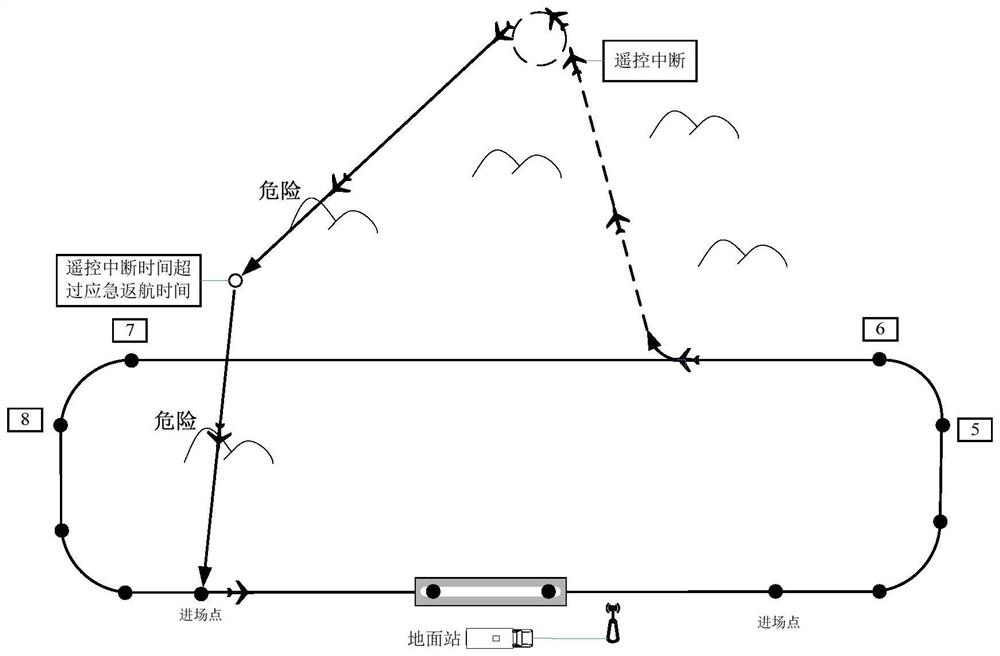
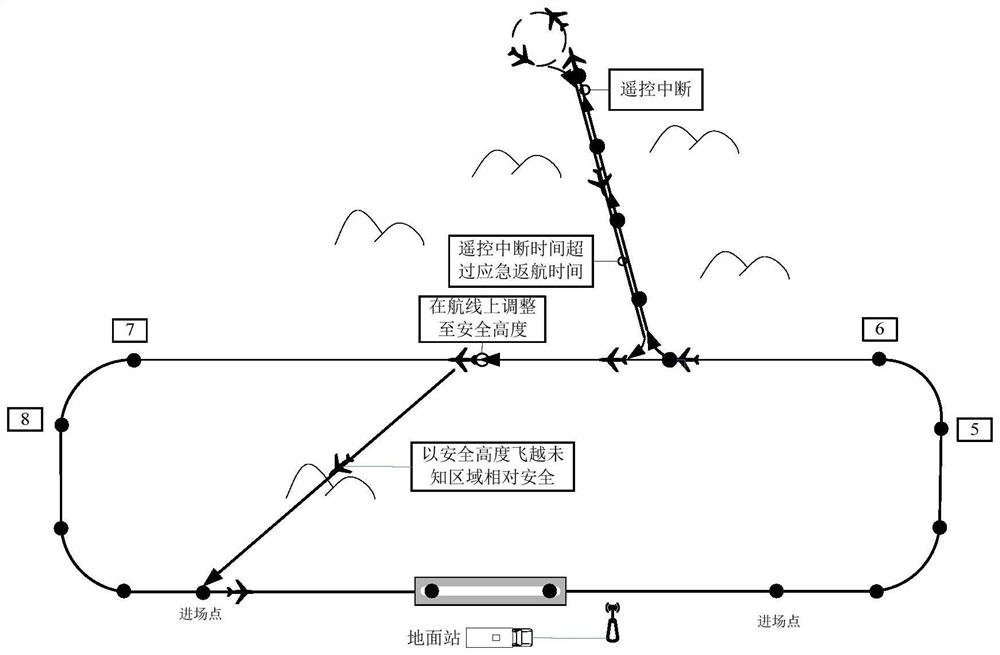
[0013] see figure 2 , the present invention a kind of unmanned aerial vehicle remote control interrupts track autonomous re-planning method, comprises the following steps:
[0014] 1) After non-autonomous flight, the UAV records the path of the UAV in the form of waypoints every certain distance and time;
[0015] 2) After the remote control is interrupted, first return to the original route according to the previously stored route;
[0016] 3) During the implementation process according to Article 2, if the remote control interruption time exceeds the emergency return time, continue to execute according to Article 2,
[0017] At the same time, adjust the aircraft altitude to a safe altitude;
[0018] 4) The aircraft adjusts to a safe altitude and then flies to the approach point
[0019] For the recorded distance and time interval, for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More