

Robot controller, and robot control method
A technology of a control device and a control method, which is applied in the direction of program control manipulator, digital control, program control, etc., and can solve problems such as complex algorithm or operation processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
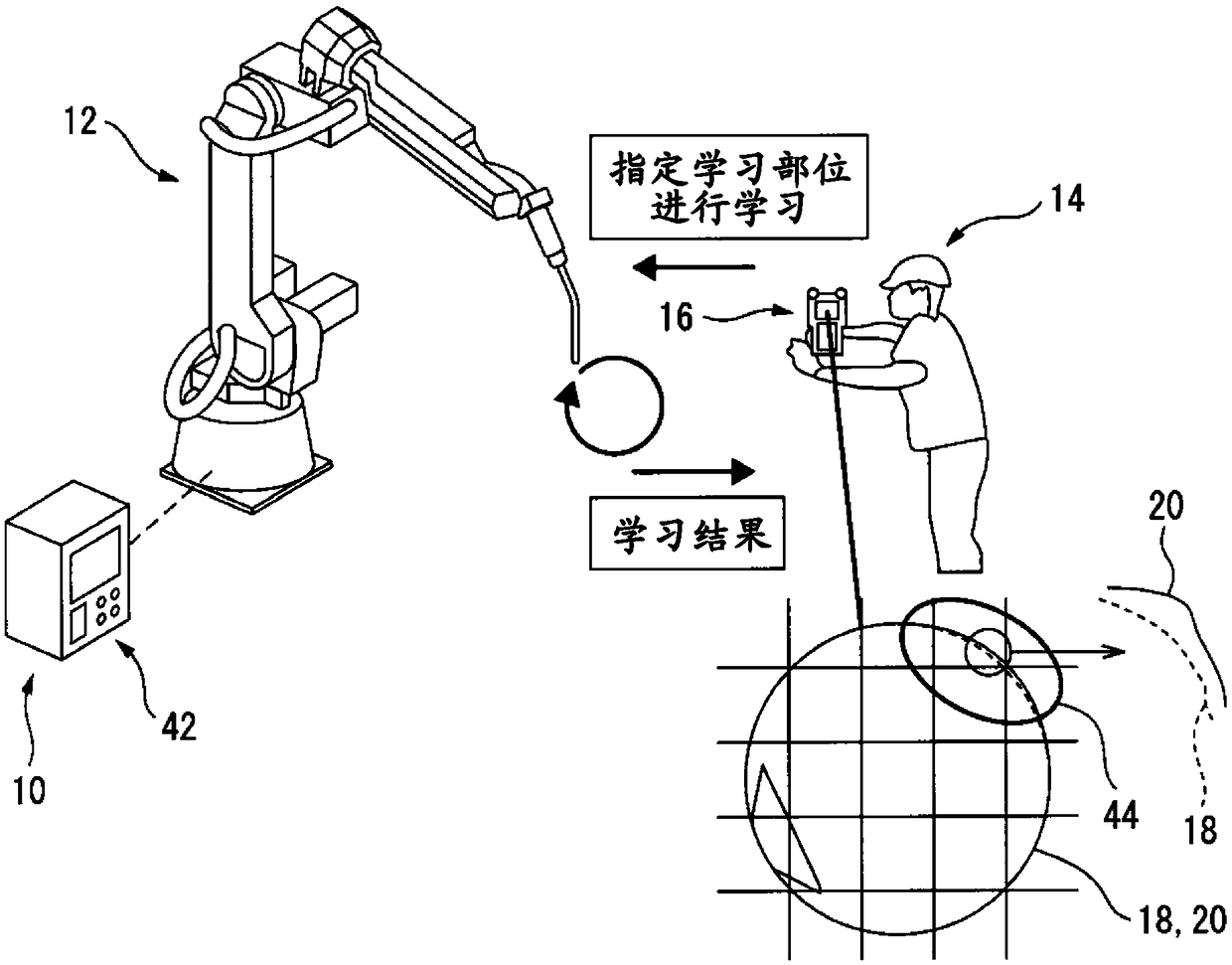
[0013] figure 1 Shown is a robot control device 10 according to an embodiment of the present invention, a robot (mechanism unit) 12 controlled by the robot control device 10 , and a teaching pendant (teaching pendant) used when teaching the robot 12, etc. ) 16 and is a diagram illustrating an example of learning control performed by the robot controller 10 . In the present embodiment, the robot 12 is configured to perform a circular drilling process on a workpiece (work) by performing an arc motion accompanied by laser irradiation. In addition, the robot controller 10 has a learning function for detecting the deviation of the motion trajectory 20 (solid line) of the robot 12 from the command trajectory (arc) 18 shown by the dotted line, and based on the detected deviation. Adjust the command trajectory.
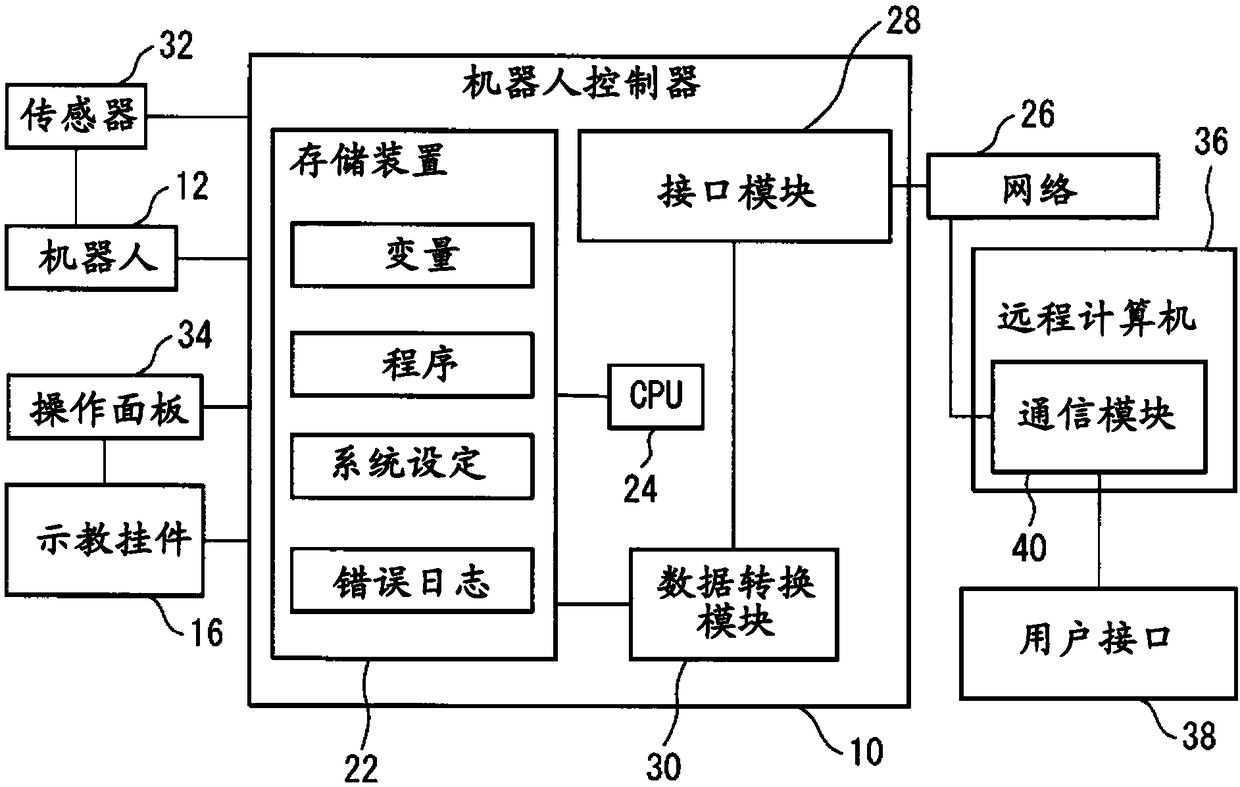
[0014] figure 2 It is a functional block diagram including the robot controller 10 , the robot 12 and the teaching pendant 16 . The robot control device 10 is, for examp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More