

Robot bionic finger
A robot and finger technology, applied in the field of robotics, can solve the problems of less freedom of fingers, fingers and thumbs, and inability to complete bionic movements, and achieve the effect of high dexterity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
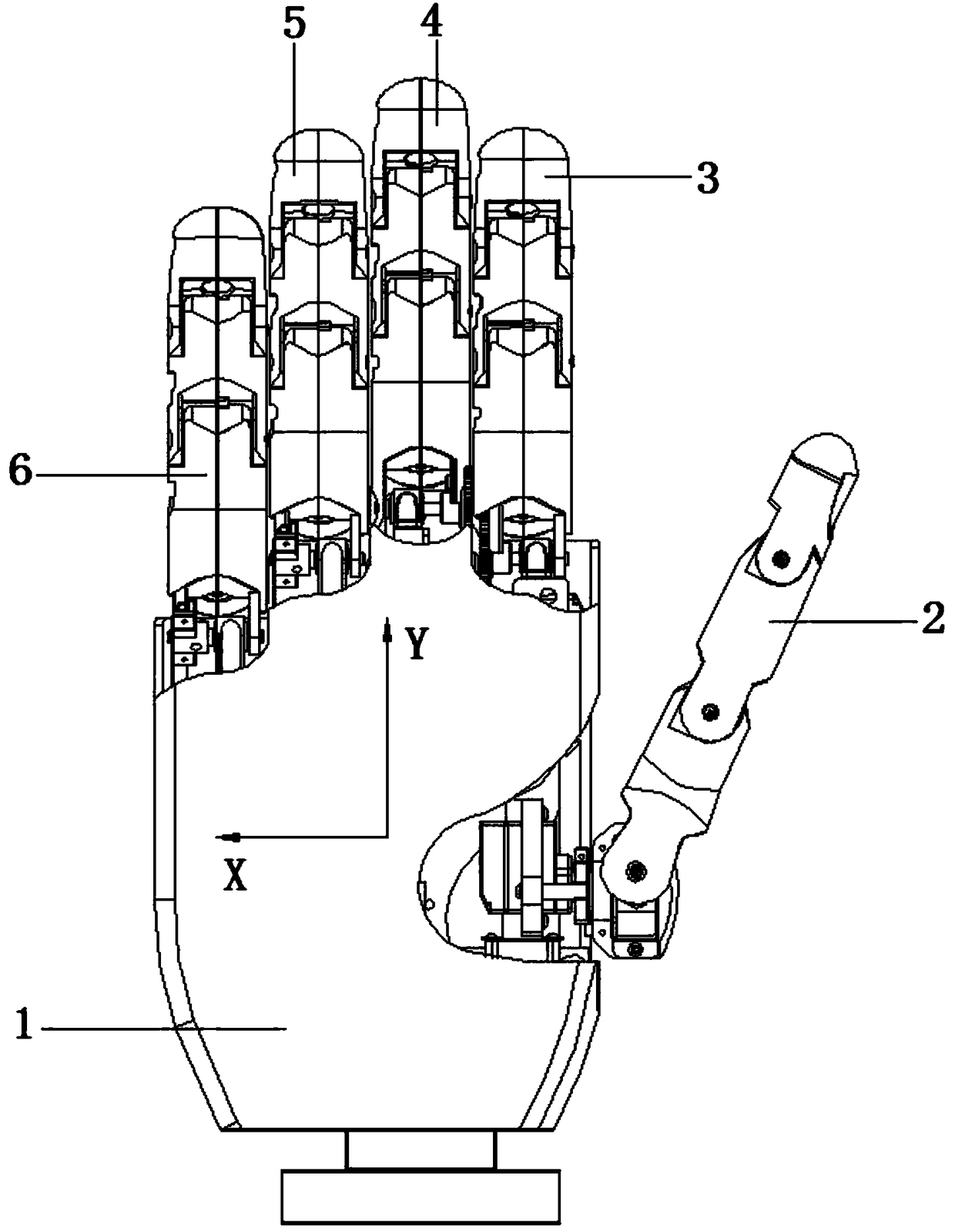
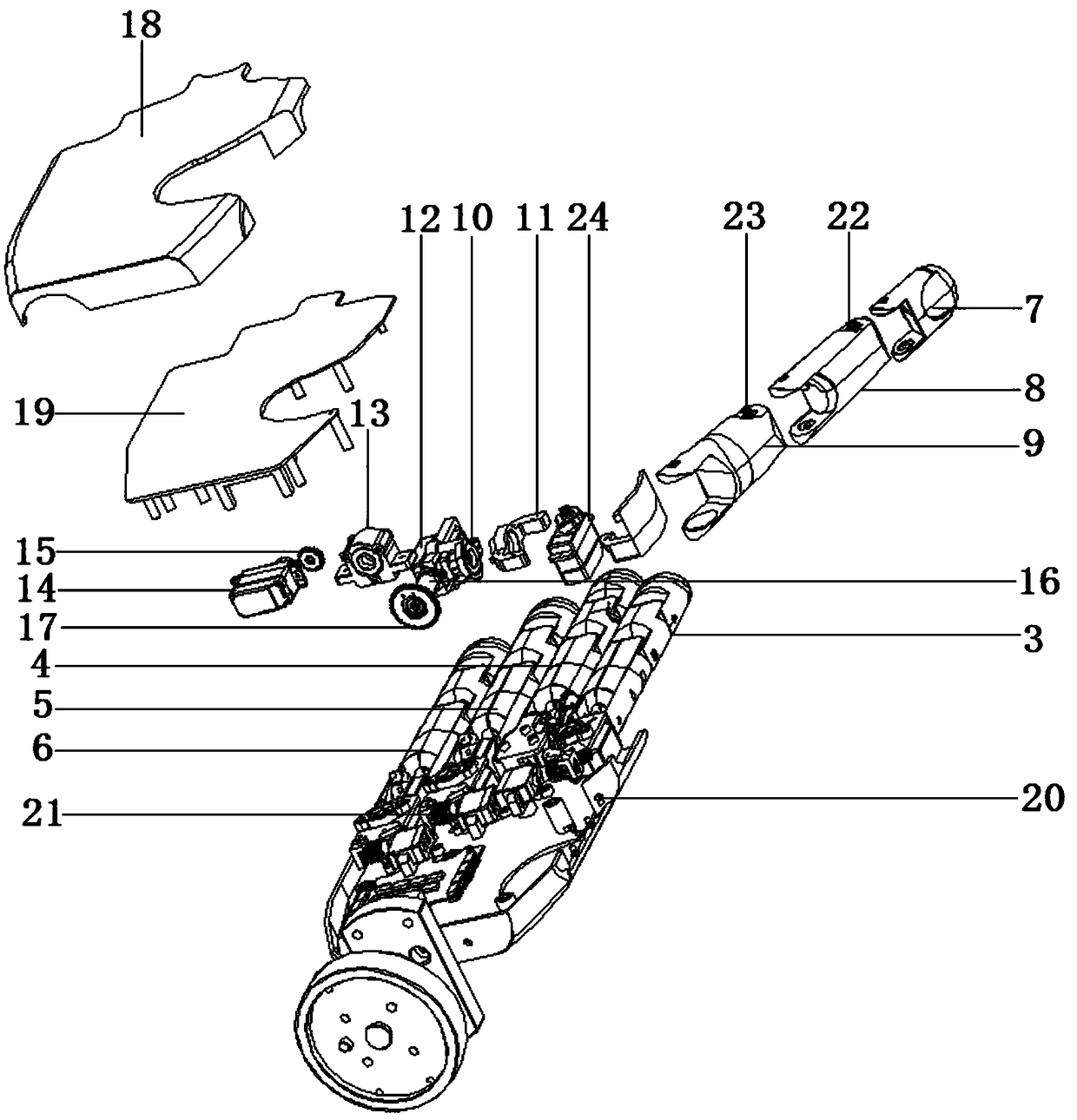
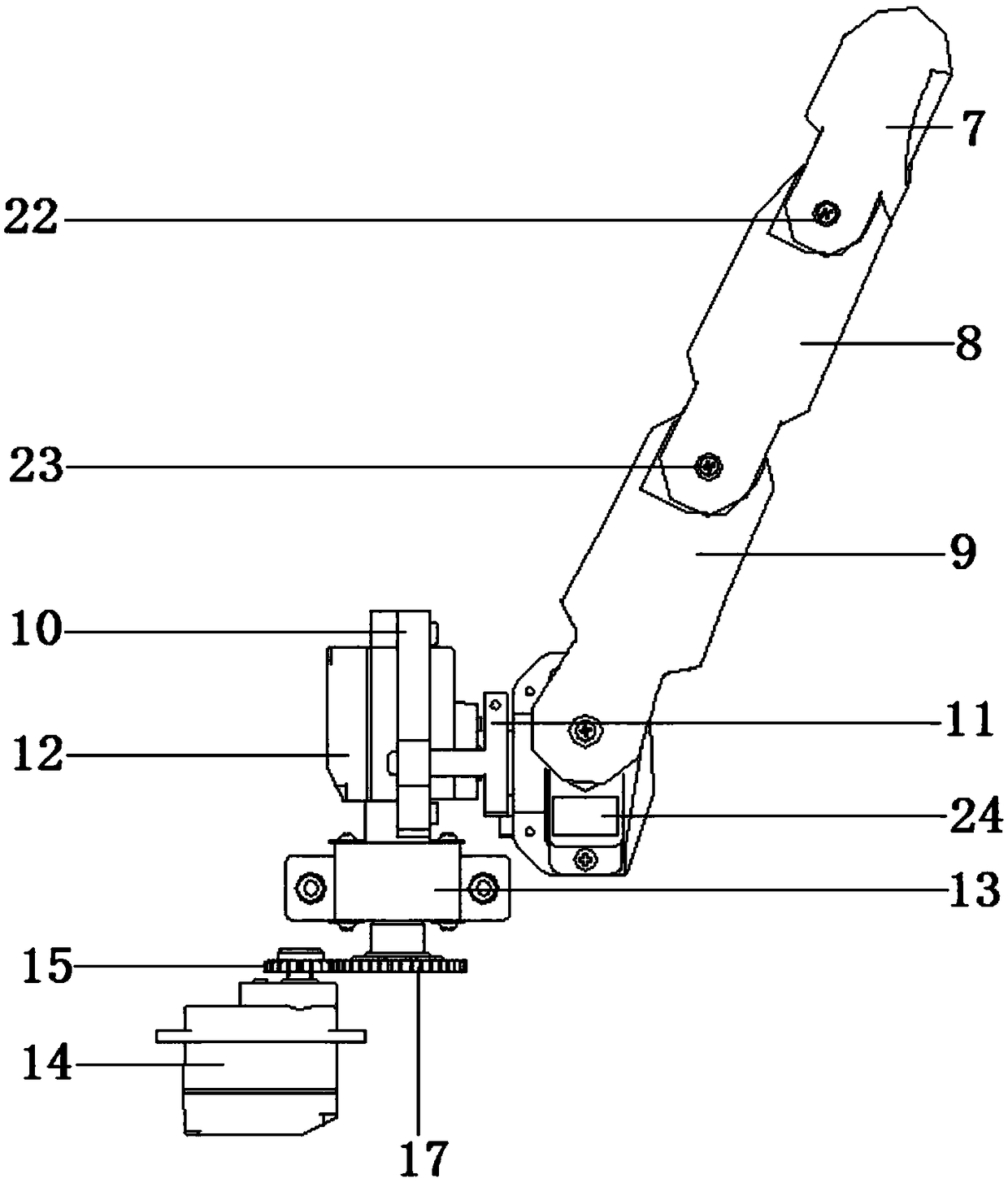
[0025] Please refer to figure 1 , the present embodiment provides a robot bionic finger, including a palm assembly 1, four common finger assemblies connected to the palm assembly 1 and a thumb assembly 2, the thumb assembly 2 includes the distal joint 7 of the thumb, the middle joint 8 of the thumb and the base of the thumb Joint 9, thumb end joint 7, thumb middle joint 8, and thumb root joint 9 are connected sequentially from top to bottom. Independent swing mechanisms are installed in the three thumb joints. These three sets of swing mechanisms can drive the three thumb joints respectively. Bending and swinging in the direction of the longitudinal axis (Y axis) of the palm to complete the three bending degrees of freedom of the three thumb joints; the root joint 9 of the thumb is connected to the second rotation mechanism, and the second rotation mechanism can drive the entire thumb assembly 2 along the horizontal axis of the palm ( Rotate in the direction of X-axis) to comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More