

Personate full-driving five-finger smart mechanical hand
A technology of manipulator and driving mechanism, which is applied in the field of robotics, can solve the problems of large size, self-locking manipulator, heavy weight, etc., and achieve the effect of small size, high dexterity and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that all the drawings of the present invention are in simplified form and use inaccurate scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
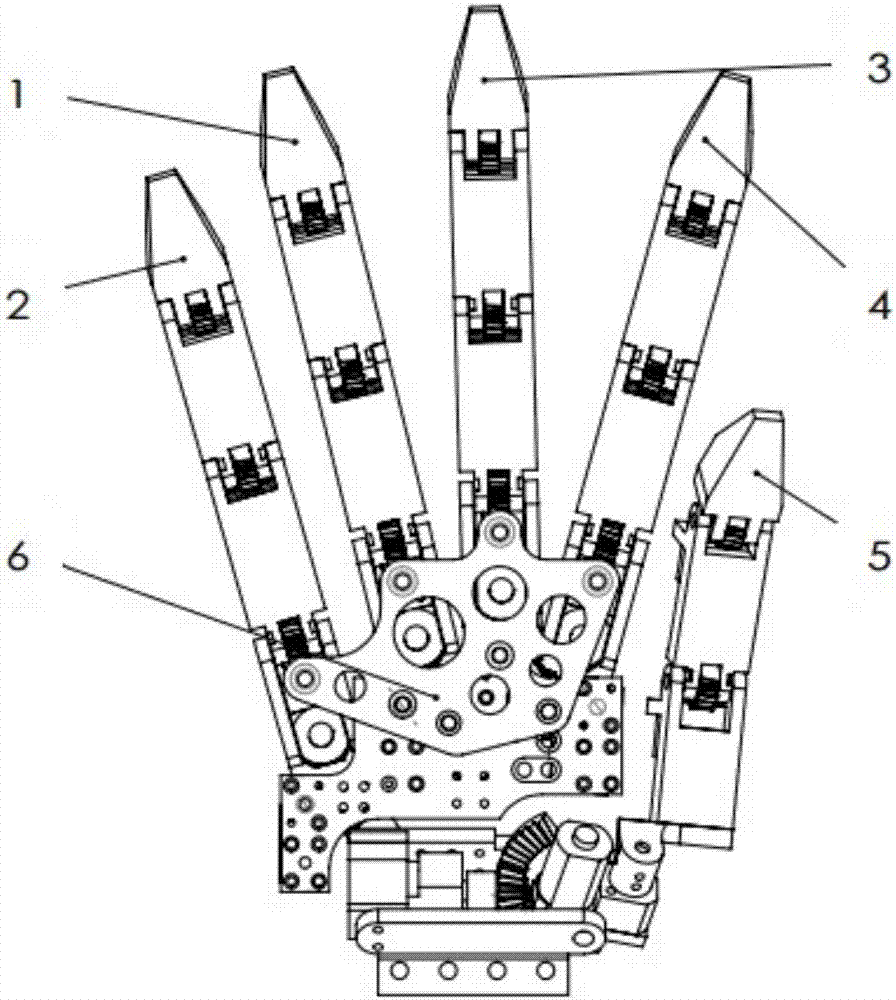
[0034] Realize the present invention needs to design and manufacture five-finger finger and driving mechanism and palm structure, the present invention provides a kind of anthropomorphic all-driven five-finger dexterous manipulator for this reason, as figure 1 As shown, it includes palm assembly 6, thumb assembly 5, index finger assembly 4, middle finger assembly 3, little finger assembly 2 and ring finger assembly 1, simulating human palm and five finger structures. The four fingers other than the thum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More