

A method for estimating and compensating lever arm in gnss/ins loose combination
A compensation method and loose combination technology are applied in the field of lever-arm effect estimation and compensation, which can solve the problems of inconvenient measurement of lever-arm effect, and achieve the effect of avoiding navigation errors and improving navigation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with specific embodiment and accompanying drawing, the present invention will be further described:
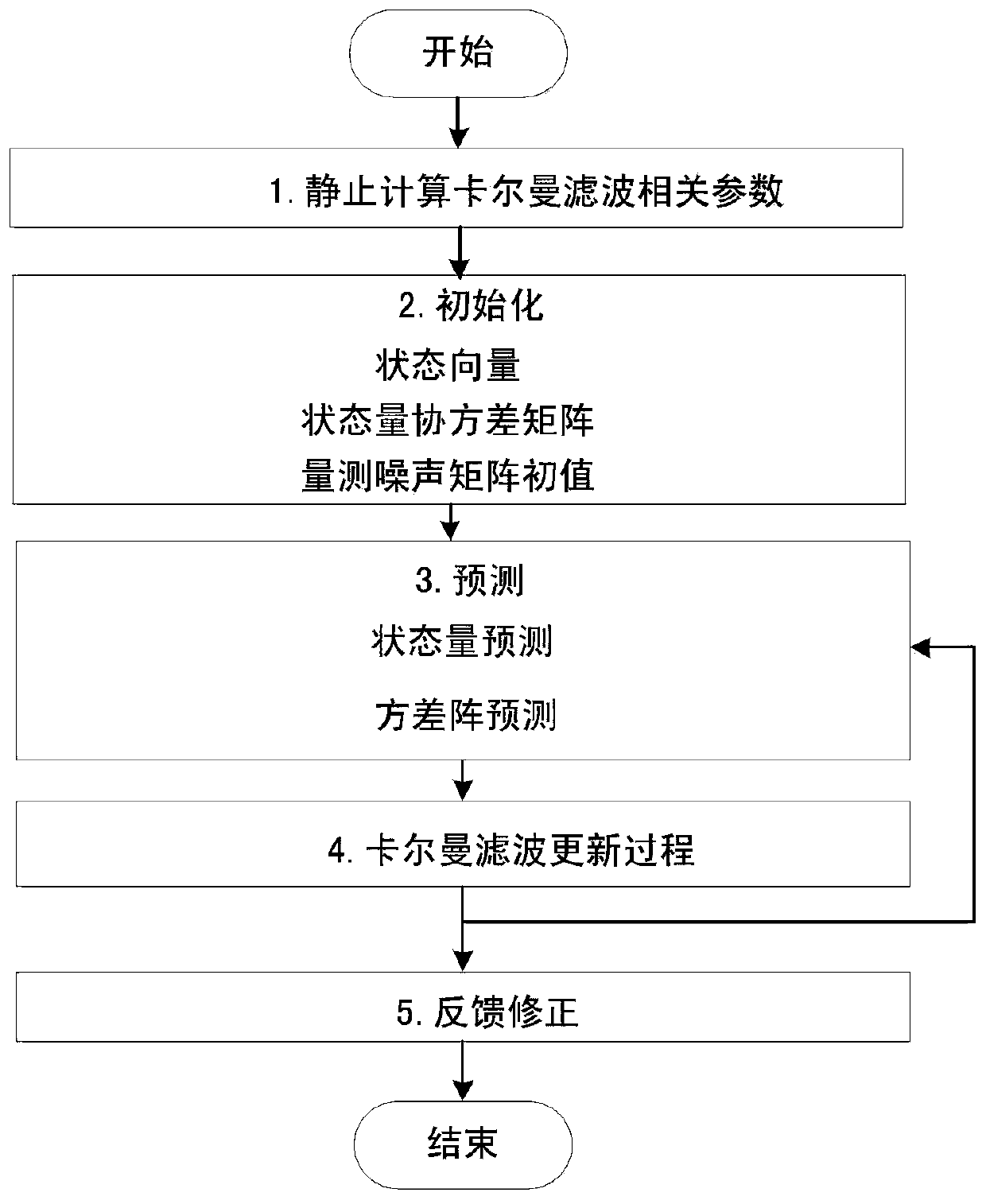
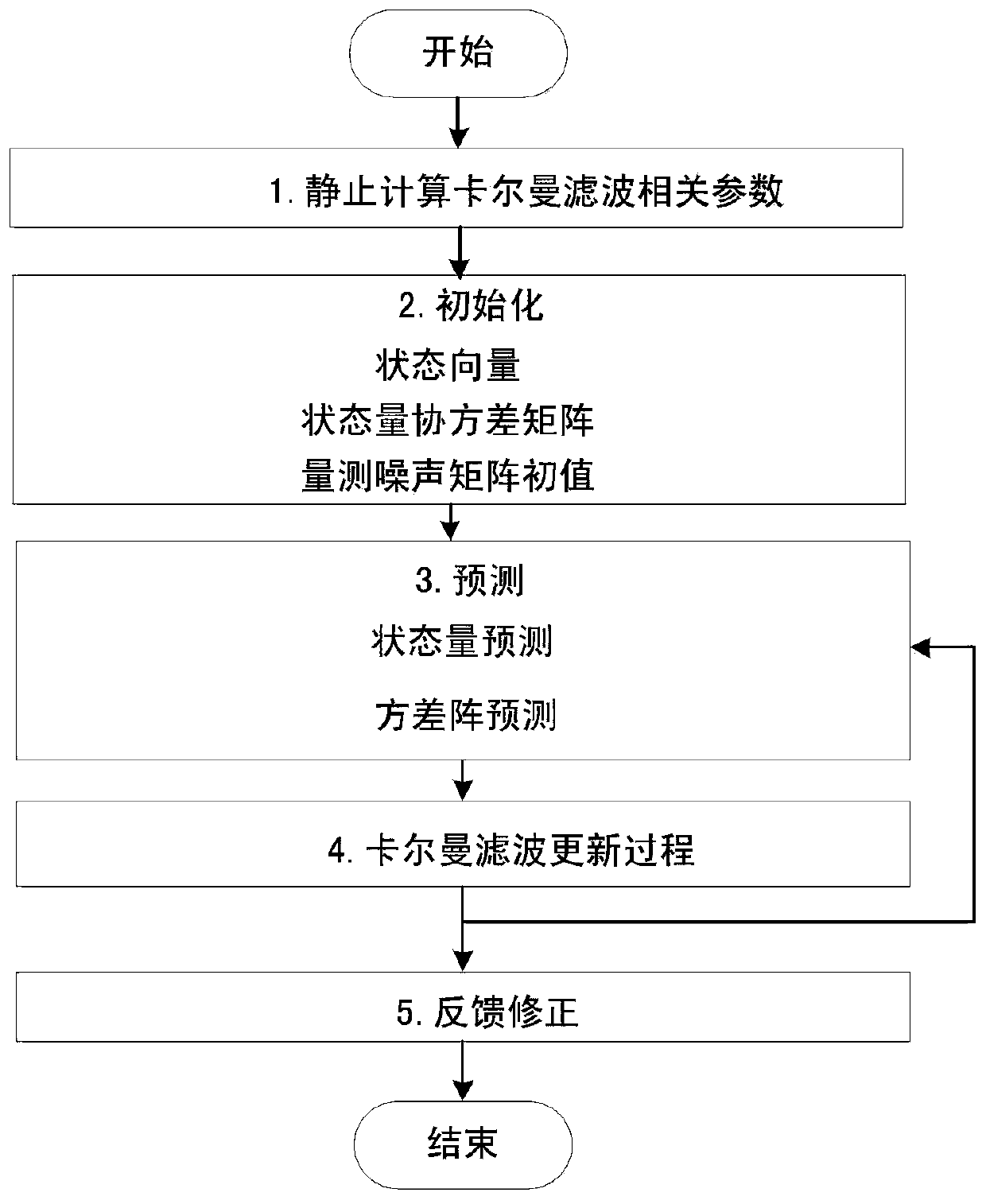
[0058] as attached figure 1 As shown, the patent of the present invention mainly includes four steps, as follows:
[0059] Step 1: Establish a Kalman filter model including the lever arm effect. The substeps are as follows:
[0060] 1.1 Select the state vector of the Kalman filter according to the scene of the navigation application. Generally speaking, the more state quantities selected, the more accurately the motion model can be reflected, and the state quantities can be estimated more accurately. In addition, the selection of state quantities is also It depends on the level of inertial navigation used. For example, for low-level MEMS inertial navigation, its scale factor and quadrature axis coupling error are relatively large, and it needs to be considered comprehensively when selecting state quantities. However, with the increase of state qua...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More