

Humanoid robot walking self-learning control method
A humanoid robot and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficulty in achieving control goals, and achieve the effect of improving control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Further illustrate the implementation process of the present invention below in conjunction with accompanying drawing and embodiment
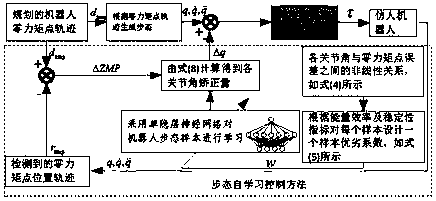
[0021] In this example, the walking quality of the robot is evaluated from three aspects: energy consumption, horizontal and vertical stability, and performance evaluation indicators are designed, which are the horizontal stability margin , vertical stability margin , energy efficiency margin , which is defined as shown in formulas (1)-(3).
[0022] In this example, according to the energy efficiency margin , the horizontal stability margin , vertical stability margin Three performance indicators to evaluate the quality of the sample and design the sample pros and cons coefficient , the better the sample quality, the larger the sample quality coefficient; in particular, the sample quality coefficient The value range of is [0,1].
[0023] According to the above objectives, the following sample pros and cons coefficients can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More