

Humanoid robot ball grabbing method
A humanoid robot, robot technology, applied in the field of intelligent robots, can solve problems such as inability to meet actual needs, inaccurate object positioning, and inflexible algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
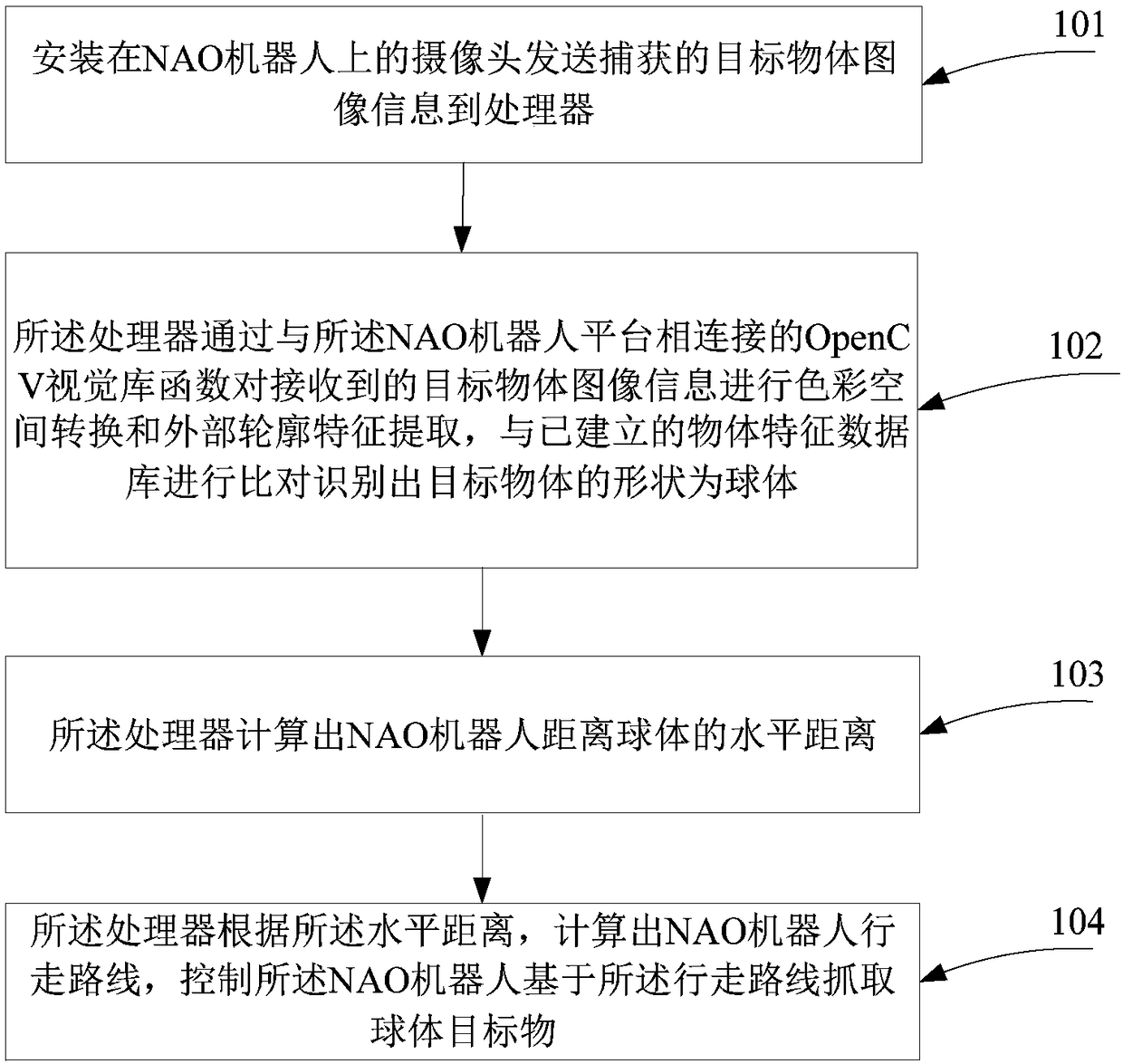
[0056] see figure 1 Shown, a kind of humanoid robot of the present invention grabs the method for spheroid, comprises:
[0057] Step 101, the camera installed on the NAO robot sends the captured image information of the target object to the processor;
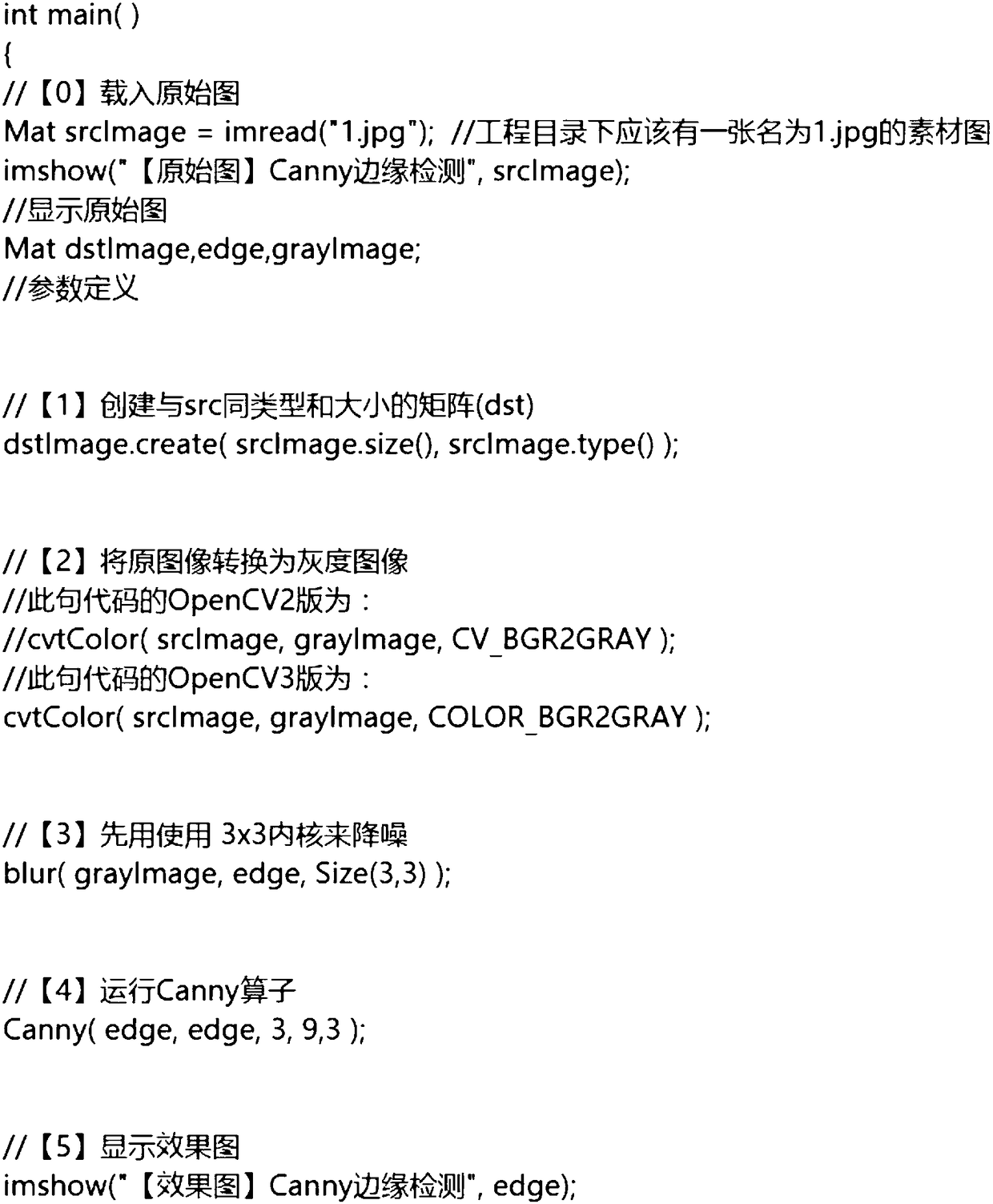
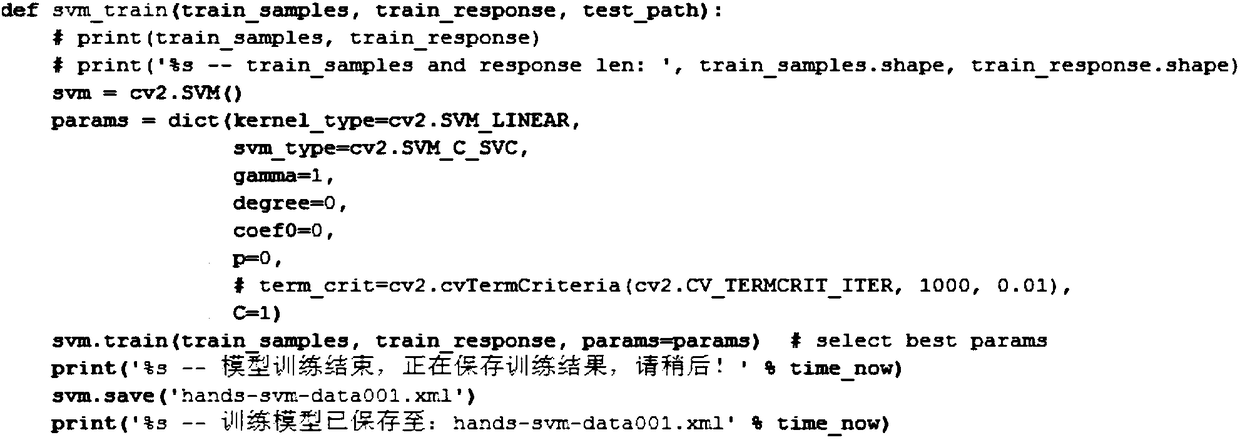
[0058]Step 102, the processor performs color space conversion and external contour feature extraction on the received target object image information through the OpenCV vision library function connected to the NAO robot platform, and compares and identifies it with the established object feature database The shape of the target object is a sphere;
[0059] Step 103, the processor calculates the horizontal distance between the NAO robot and the sphere;
[0060] Step 104, the processor calculates the walking route of the NAO robot according to the horizontal distance, and controls the NAO robot to grab the spherical target based on the walking route.
[0061] The Nao robot application is built on a large number of advanced com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More