

Sensor position calibration and data registration method and system
A data splicing and sensor technology, applied in the field of sensors, can solve problems such as inability to complete calibration, sensor calibration and data splicing, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
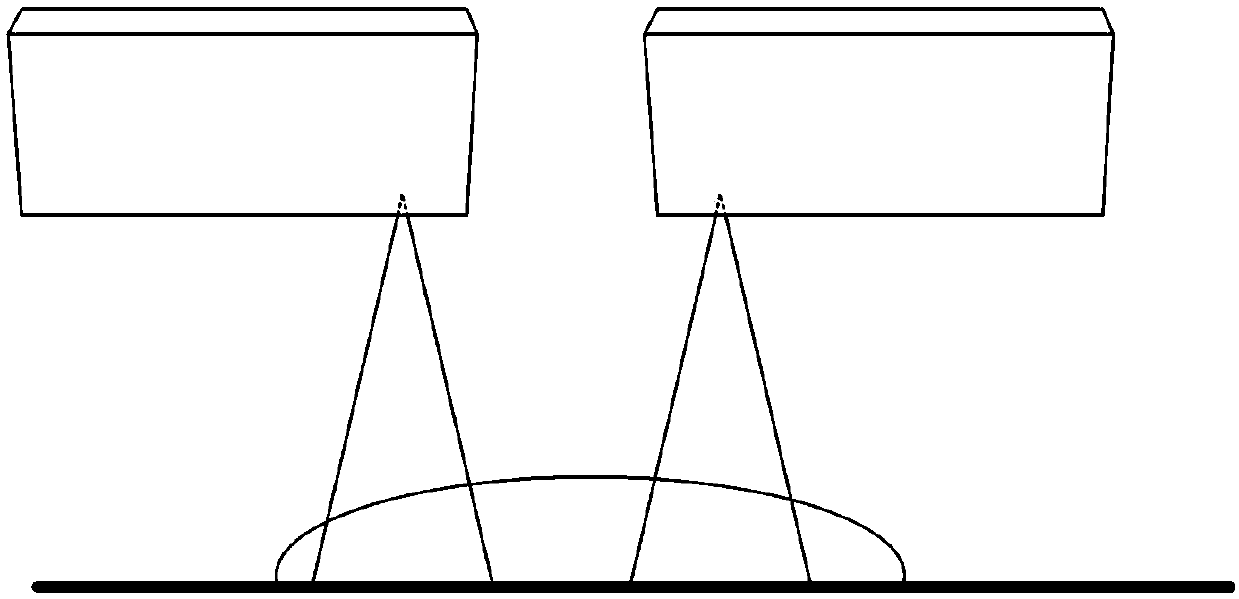
[0052] figure 1 It is a schematic diagram of the sensor position calibration principle provided by Embodiment 1 of the present invention.
[0053] The sensors are arranged and installed according to the parameter characteristics of the measured object and the sensor itself. When arranging and installing, only the characteristics and structure of the measured object and the sensor itself need to be considered. When calibration is required, such as figure 1 As shown, at least one spherical standard with known radius is used, placed at the position of the object to be measured, and multiple (two in the figure) three-dimensional sensors are placed on the spherical standard to scan it to obtain spherical data , the relative positional relationship between these sensors can be obtained by calculating according to the obtained data, and this process is to calibrate the relative positions of multiple three-dimensional sensors. Using the results obtained from the calibration, the dat...
Embodiment 2
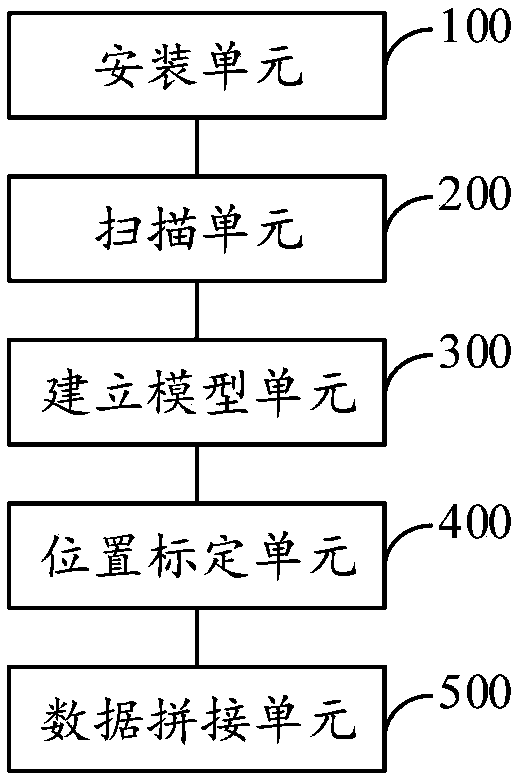
[0087] image 3 It is a schematic diagram of the sensor position calibration and data splicing system provided by Embodiment 2 of the present invention.
[0088] The embodiment of the present invention also provides a system for sensor position calibration and data splicing, which is used to realize the method for sensor position calibration and data splicing in the above-mentioned embodiments. refer to image 3 , the sensor position calibration and data splicing system includes the following units:
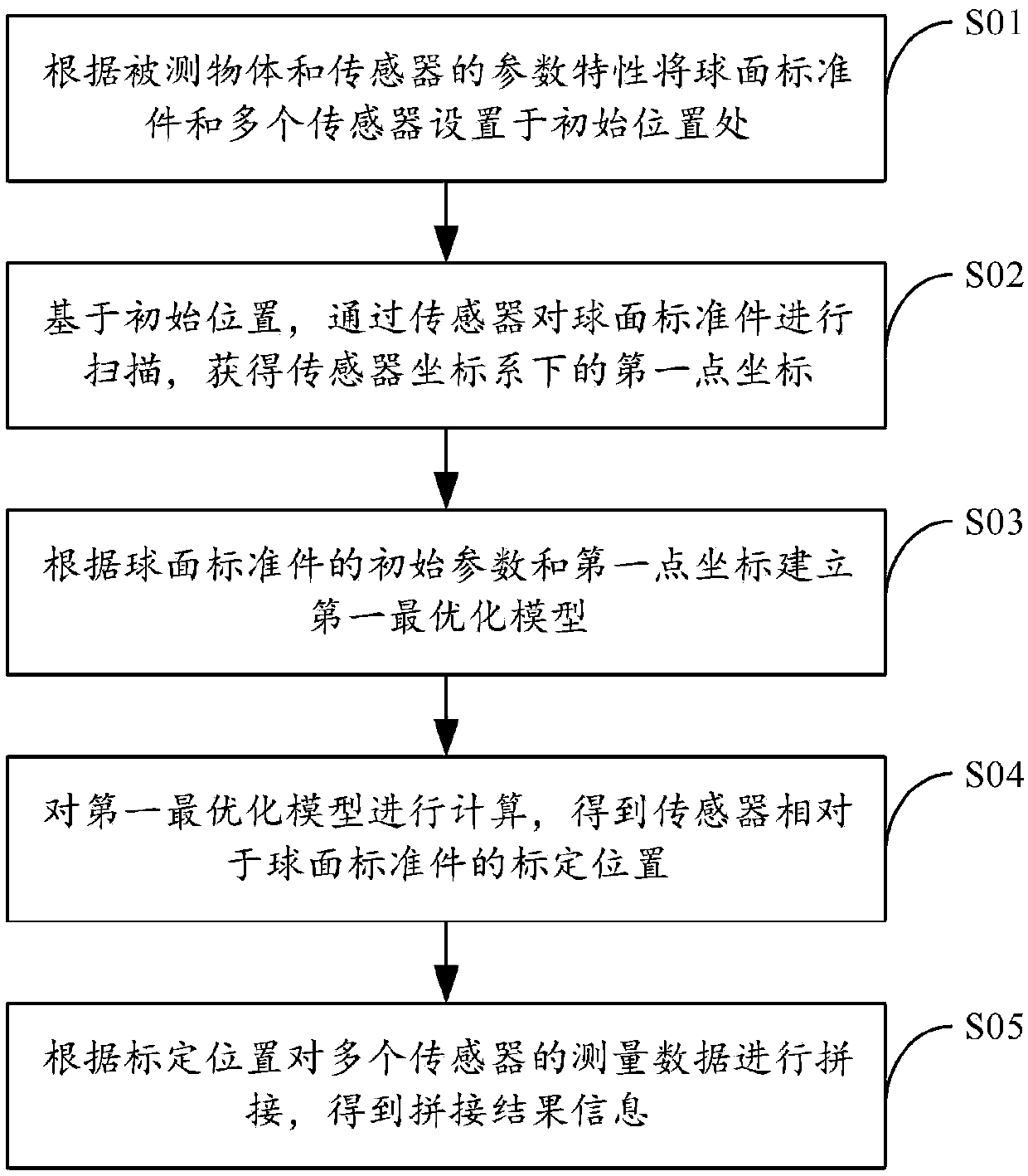
[0089] The installation unit 100 is used to set the spherical surface standard and a plurality of sensors at the initial position according to the parameter characteristics of the measured object and the sensor;
[0090]The scanning unit 200 is used to scan the spherical standard through the sensor based on the initial position to obtain the first point coordinate P in the sensor coordinate system si,k ;
[0091] Establishing a model unit 300 for establishing a first optimiza...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More