Brainwave treatment bed movement control method
A motion control and treatment bed technology, applied in medical transportation, hospital beds, transportation and packaging, etc., can solve problems such as limited space, patient impact, collision between the robot arm and the surrounding environment or collision between the robot arm and the bed board
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0023] This embodiment provides a method for controlling the motion of an EEG therapy couch, which includes the following steps:
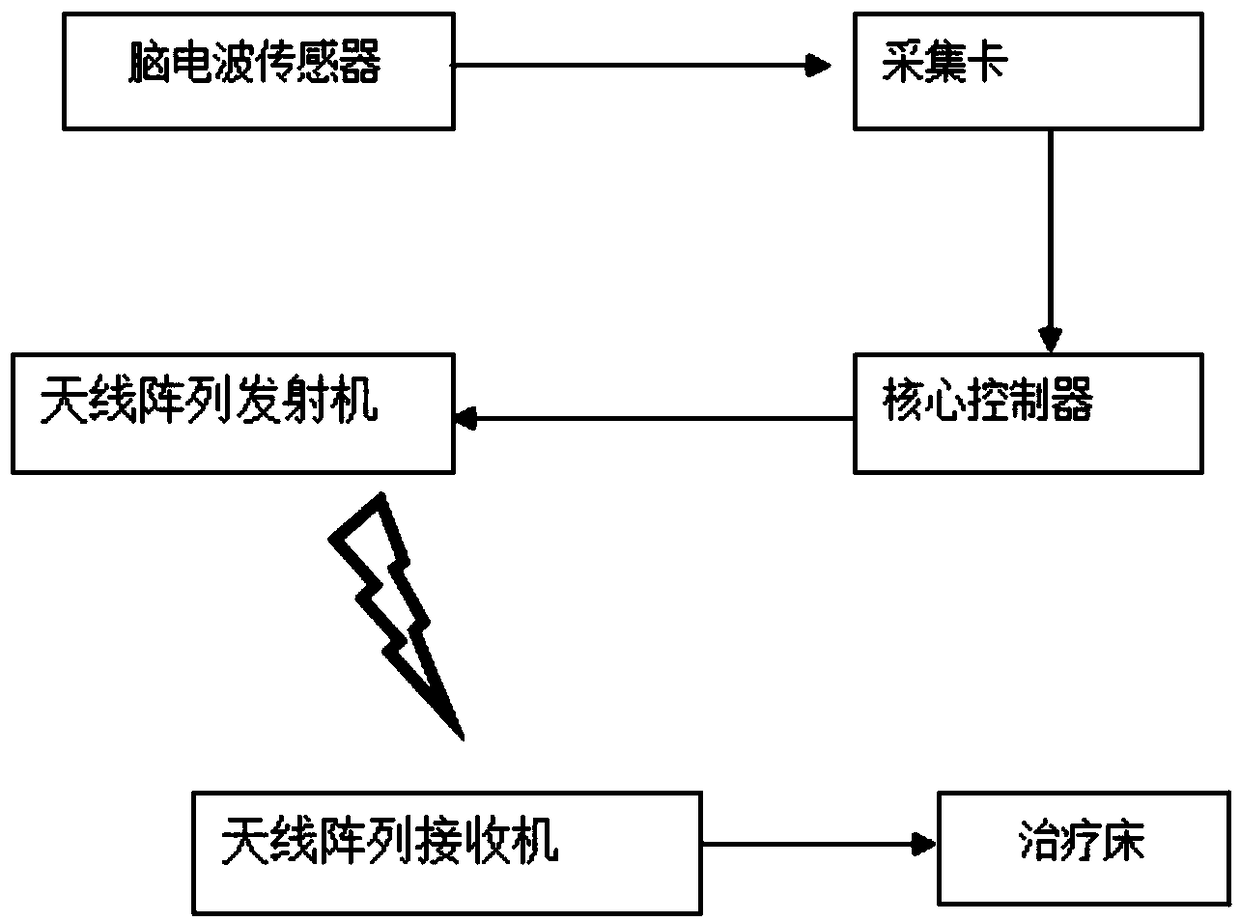
[0024] Step S1: if figure 1 As shown, a treatment bed motion control device is provided, including an acquisition card and an brain wave sensor connected to it and a core controller (the controller is composed of a high-speed data processing unit FPGA, which is processed by an algorithm and sent through an antenna array receiver to the treatment couch), the signal transmitter and the treatment couch perform signal transmission through the wireless network; the signal transmitter includes an antenna array transmitter and an antenna array receiver, the antenna array transmitter is connected to the core controller, and the antenna array receiver is connected to the treatment couch ; The antenna array transmitter and the antenn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



