

Method and system for accurately moving mechanical arm to designated location by robot
A technology for moving the manipulator and specifying the position. It is applied in the direction of manipulators, program-controlled manipulators, instruments, etc. It can solve the problems that ordinary skilled workers cannot complete, complexity, and low efficiency, and achieve strong anti-interference, accurate physical coordinates, and algorithm efficiency. high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
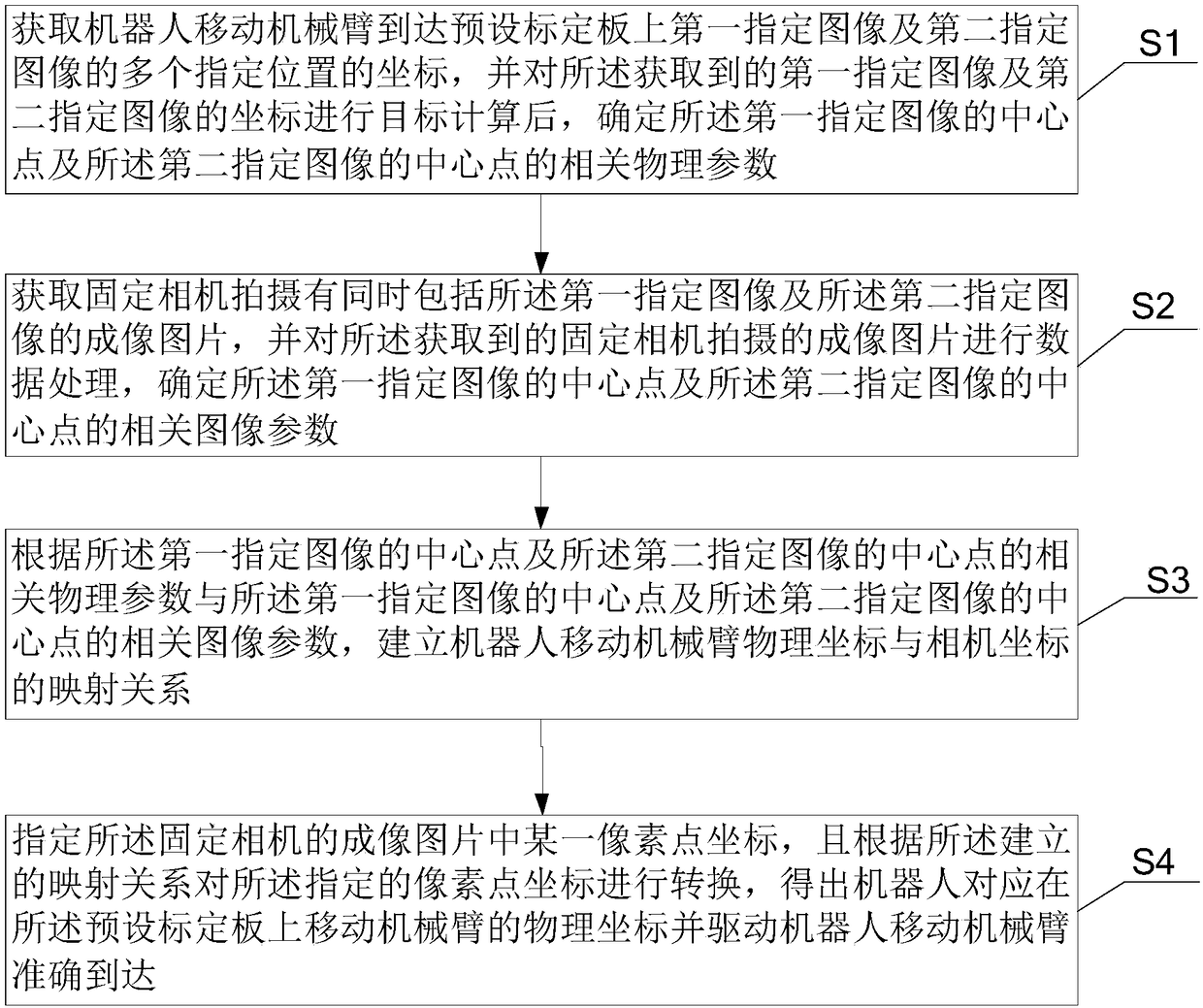
[0035] like figure 1 As shown, in the embodiment of the present invention, a method for a robot to accurately move a mechanical arm to a specified position is provided, and the method includes:
[0036] Step S1. Obtain the coordinates of the first designated image and the second designated image on the preset calibration board when the robot moves the mechanical arm to a plurality of designated positions, and carry out the coordinates of the obtained first designated image and the second designated image. After the target is calculated, determine the relevant physical parameters of the center point of the first specified image and the center point of the second specified image;
[0037] Step S2. Obtain an imaging picture taken by a fixed camera that includes both...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More