

Mechanical hand with auxiliary supporting mechanisms
The technology of a manipulator and a manipulator is applied in the field of manipulators, which can solve the problems such as the failure of adsorbing plates, affecting the work efficiency of the vacuum suction cup manipulator, etc., and achieve the effect of improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
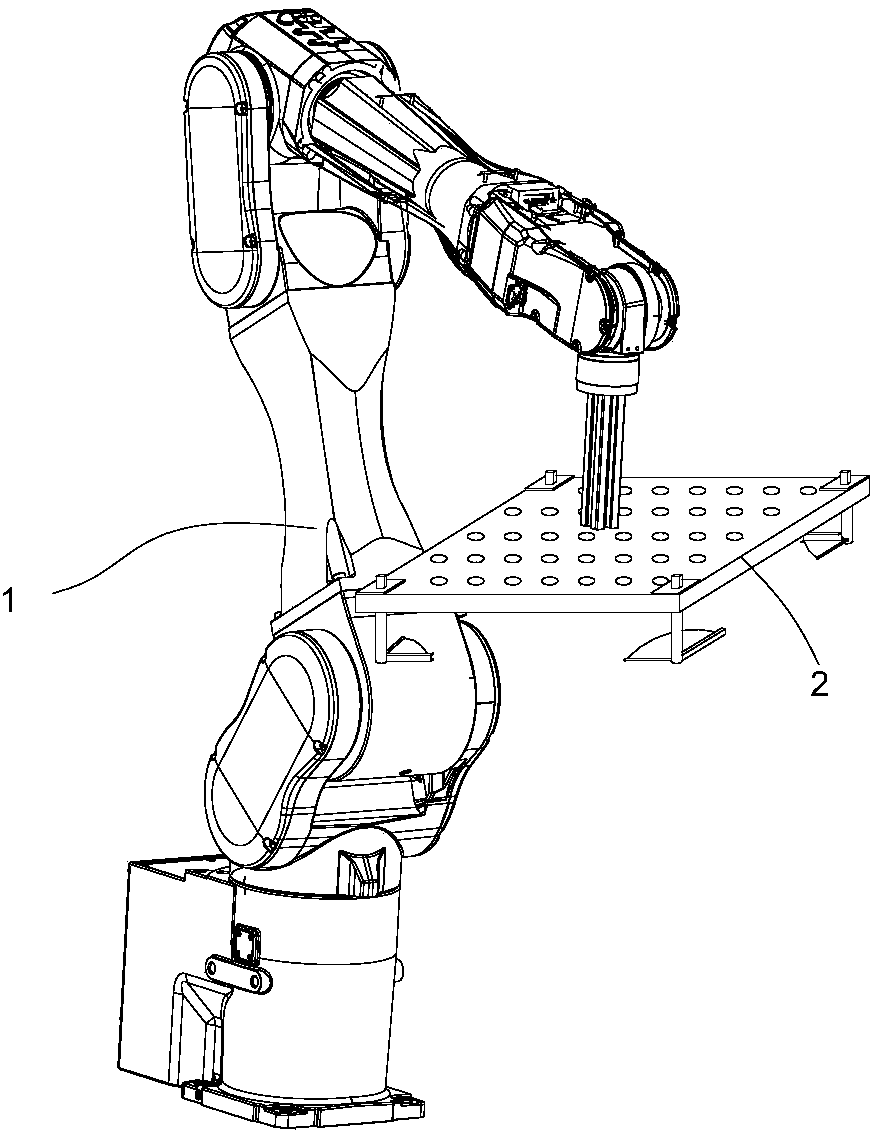
[0017] See Figure 1-Figure 3 , the invention discloses a manipulator with an auxiliary supporting mechanism, which is mainly used for absorbing flexible plates.
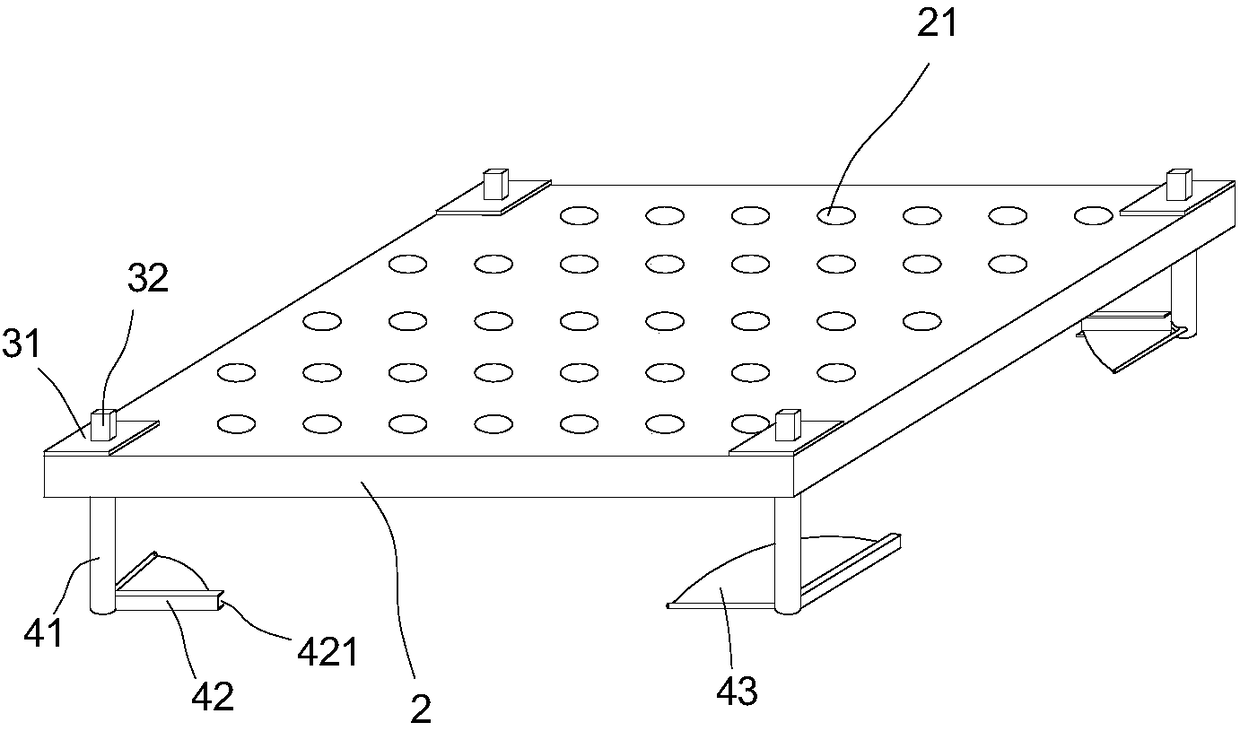
[0018] Specifically, the manipulator includes a mechanical arm 1 and a suction plate connected to the mechanical arm 1. The suction plate 2 is provided with a plurality of suction points 21 arranged in a matrix, and the suction points 21 are in contact with the surface of the plate, thereby sucking the plate. .
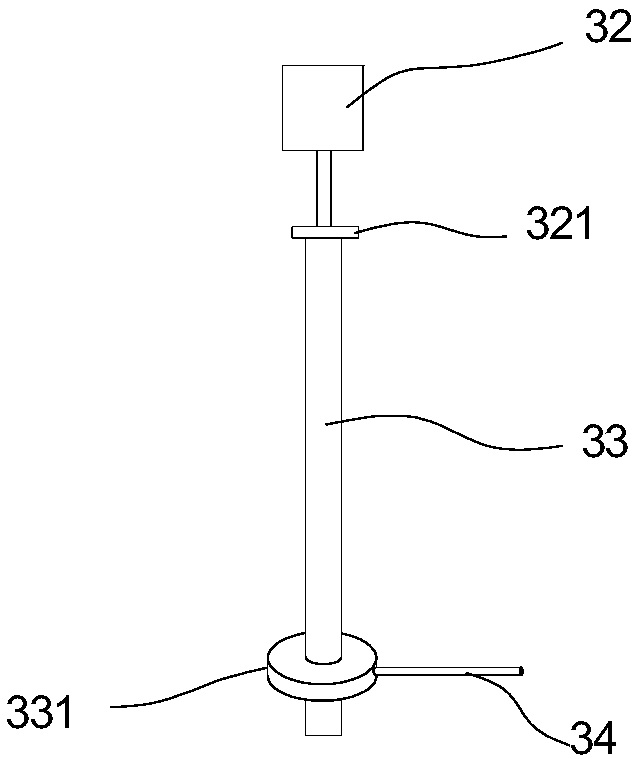
[0019] Each of the four corners of the suction plate 2 is provided with an auxiliary support mechanism, which includes a hollow cylindrical mounting rod 41 vertically fixed on the lower surface of the suction ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More