

System and method for planning dynamic path of robot based on cloud terminal
A dynamic path and planning system technology, applied in control/regulation systems, instruments, non-electric variable control, etc., can solve the problems of non-real-time dynamic global planning, low intelligence level, and poor robot autonomy, and achieve dynamic global planning, The effect of improving operational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
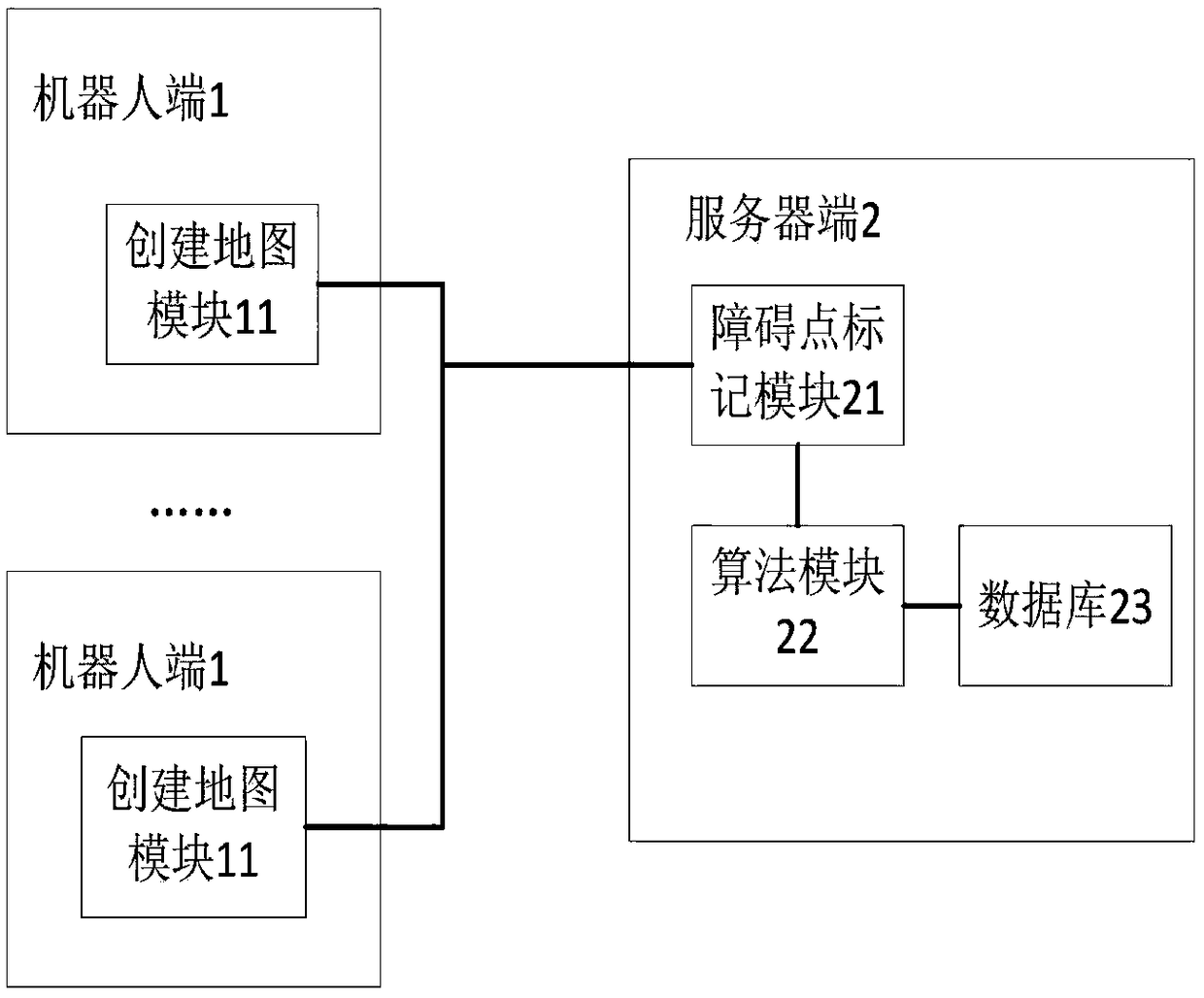
[0023] figure 1 It is the architecture diagram of the cloud-based multi-robot dynamic path planning system of the present invention, as shown in the figure. In one or more embodiments of the present invention, the present invention is based on a cloud-based robot dynamic path planning system, including a plurality of robot terminals 1 and server terminals 2 .
[0024] In addition to including a controller, a navigation module, a motion module, and a storage module (not marked in the figure), the robot terminal 1 also includes a map creation module 11, and the map creation module 11 of the robot terminal 1 establishes a preset map. The map may be a single area map, but the invention is not limited thereto. The preset map can be stored in the storage module of the robot, so that the navigation module can call the preset map, and the motion module can control the movement of the robot under the control of the controller.
[0025] Wherein, the preset map may be stored in the for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More