

Method and device for determining traveling strategy of mobile robot, and mobile robot
A technology for mobile robots and strategy determination, which can be applied to instruments, motor vehicles, transportation and packaging, etc. It can solve problems that affect machine walking strategies and map construction, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
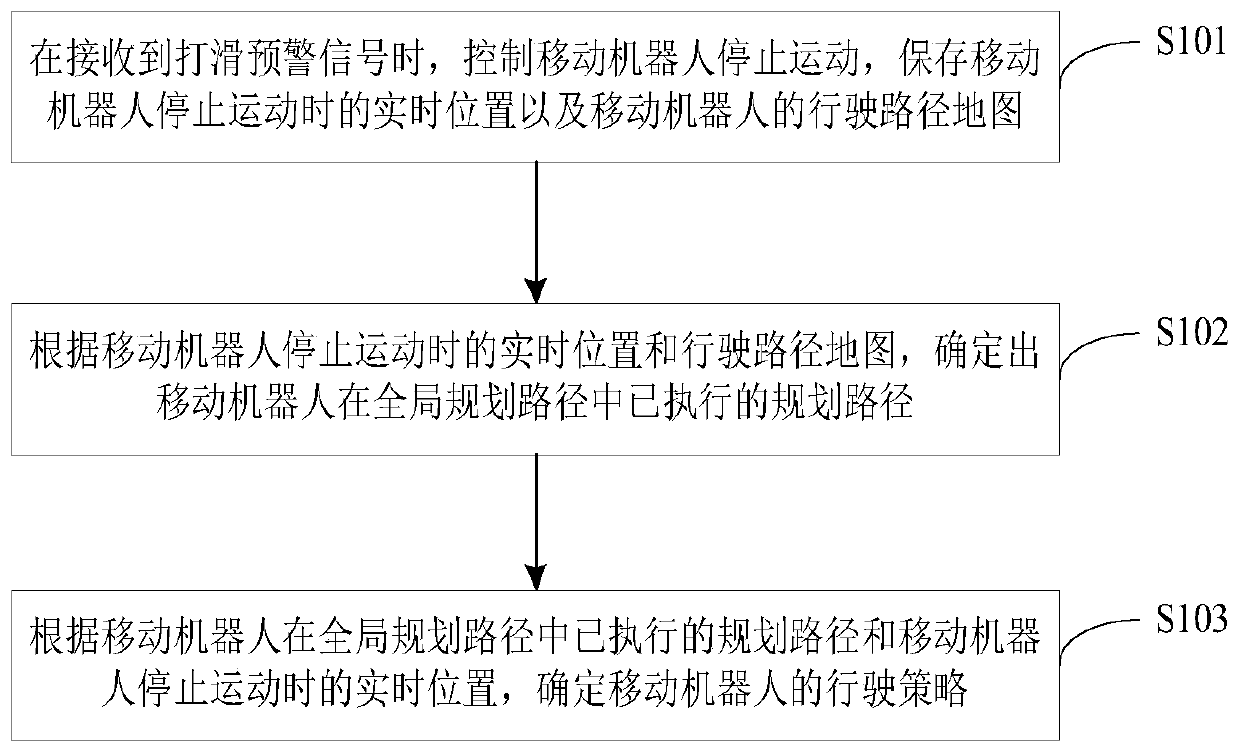
[0042] see figure 1 As shown, a method for determining a driving strategy of a mobile robot provided in an embodiment of the present application includes steps S101 to S103.
[0043] In step S101, when the skid warning signal is received, the mobile robot is controlled to stop moving, and the real-time position and the driving route map of the mobile robot are saved when the mobile robot stops moving.
[0044] Wherein, the driving path map can be constructed based on chassis odometer data, structured light data, or lidar data of the mobile robot, which is not limited here.
[0045]When the mobile robot is running, the global planning path of its movement can be set in advance. During the movement of the mobile robot, based on the chassis odometer data, structured light data or lidar data of the mobile robot, it will generate a corresponding path from start to stop. A map of the driving route during the time period while exercising. In the case of slipping, the displacement o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More