

Sweeping robot region division system and method
A method of area division and technology of sweeping robots, which can be applied to robot cleaning machines, manual sweeping machines, carpet cleaning, etc., can solve problems such as difficulty in cleaning and walking, and achieve effective cleaning and good autonomous movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
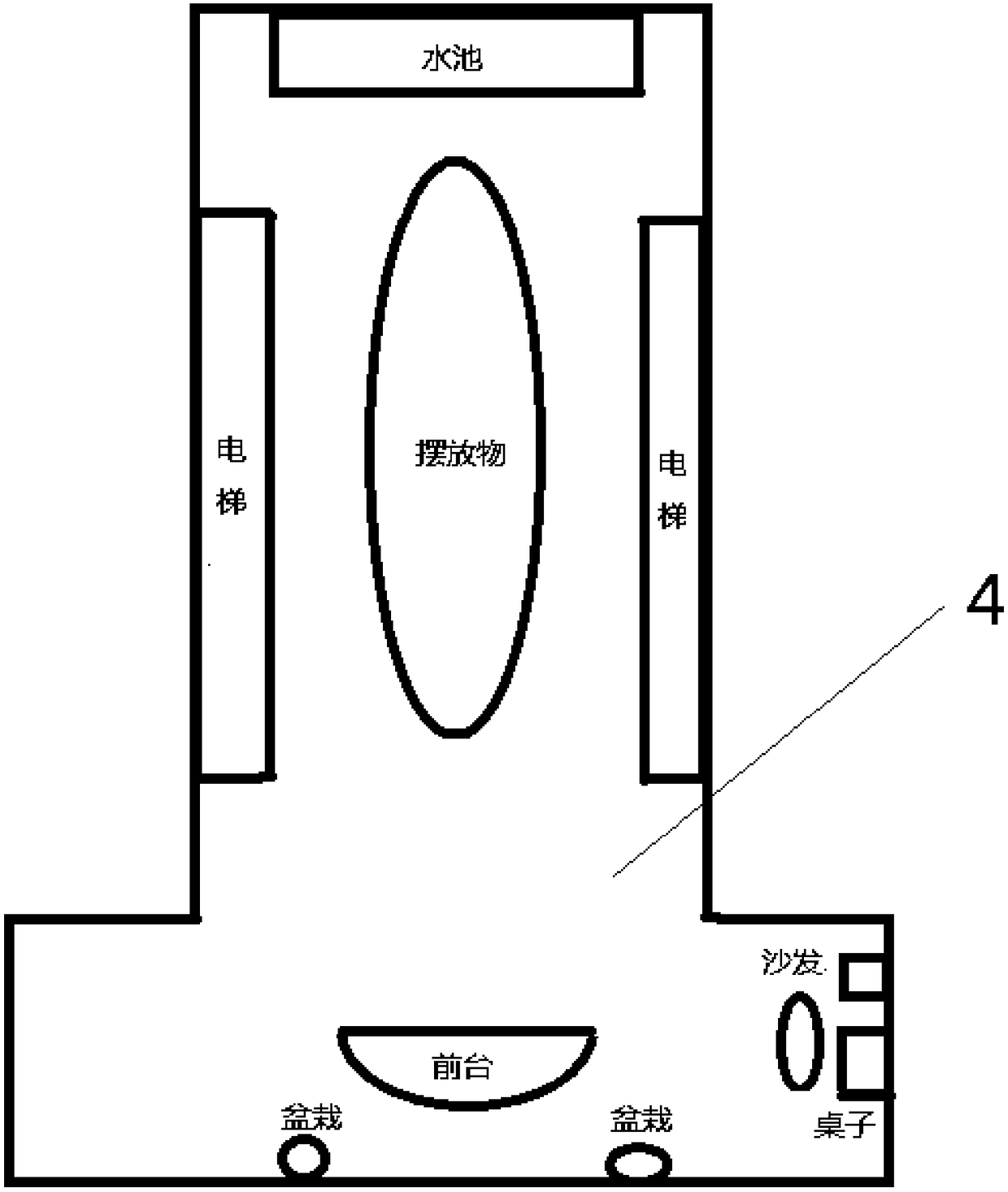
[0033] Such as figure 2 As shown, the plane profile of a hotel lobby made by laser scanning, in the clean area 4 of the plane profile, there are obstacles such as pools, elevators, placed objects, reception desks, potted plants, sofas, tables and chairs.
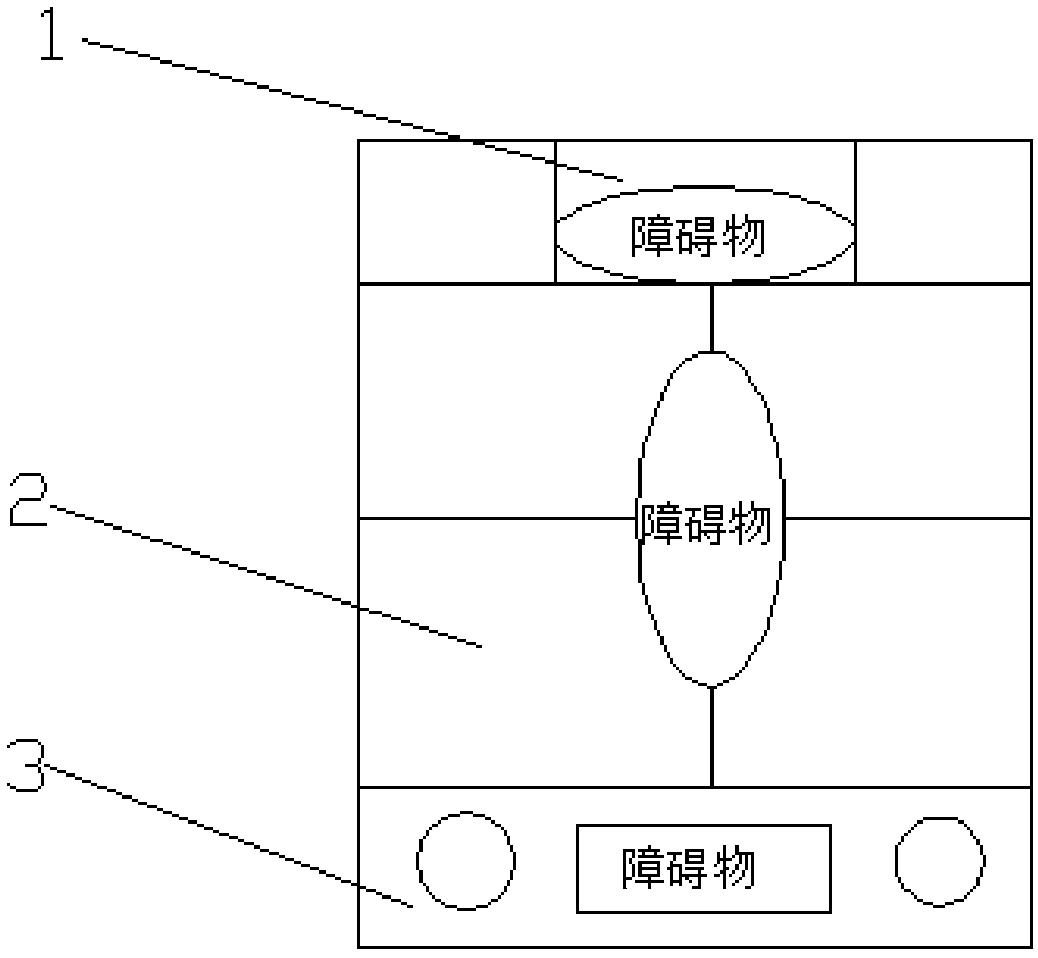
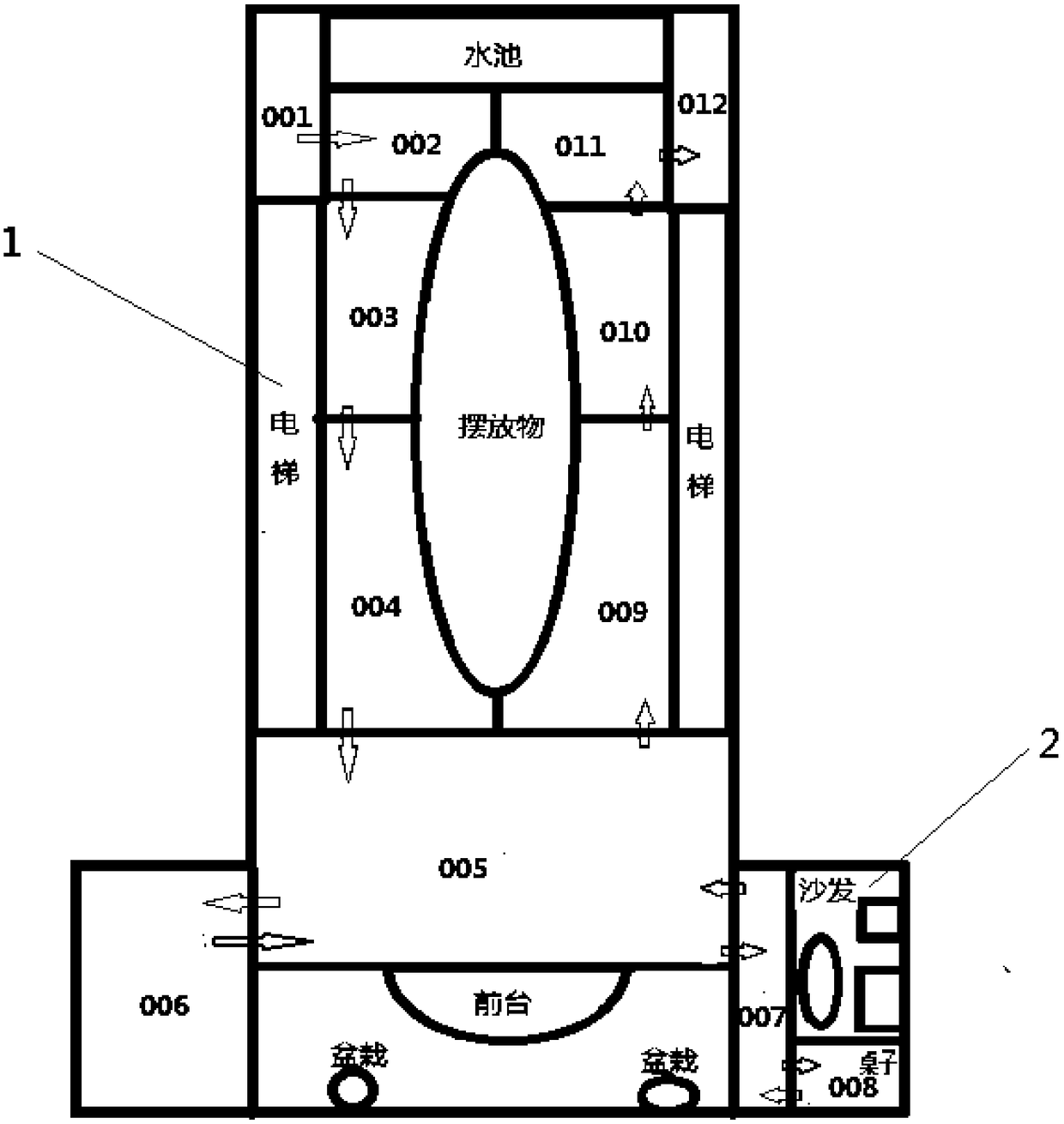
[0034] Such as image 3 As shown in , the area that large-scale space robots cannot enter is isolated from the obstacle area as an obstacle isolation area, that is, a non-cleaning area. Obstacles such as the front desk, potted plants, sofas, tables and chairs are closely placed, and the area where they are placed is surrounded and isolated from the area where large space robots adjacent to them cannot enter to form a tightly arranged object isolation area 2. Three-dimensional obstacles such as elevators, pools, and placed objects are surrounded and isolated according to their respective vertical projection areas to form a three-dimensional obstacle isolation area 1.
[0035] After isolating the obstacles, divide the remai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More