

Joint space trajectory optimization method for surface modification robot
A technology of robot joints and surface modification, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex motion characteristics of surface-modified robots and difficult to describe the motion path of the end of surface-modified robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In the following, the method for optimizing the joint space trajectory of the surface modification robot proposed by the present invention will be further described in detail with reference to the accompanying drawings and specific embodiments. According to the following description and claims, the advantages and features of the present invention will be clearer. It should be noted that the drawings all adopt a very simplified form, which are only used to conveniently and clearly assist in explaining the embodiments of the present invention.
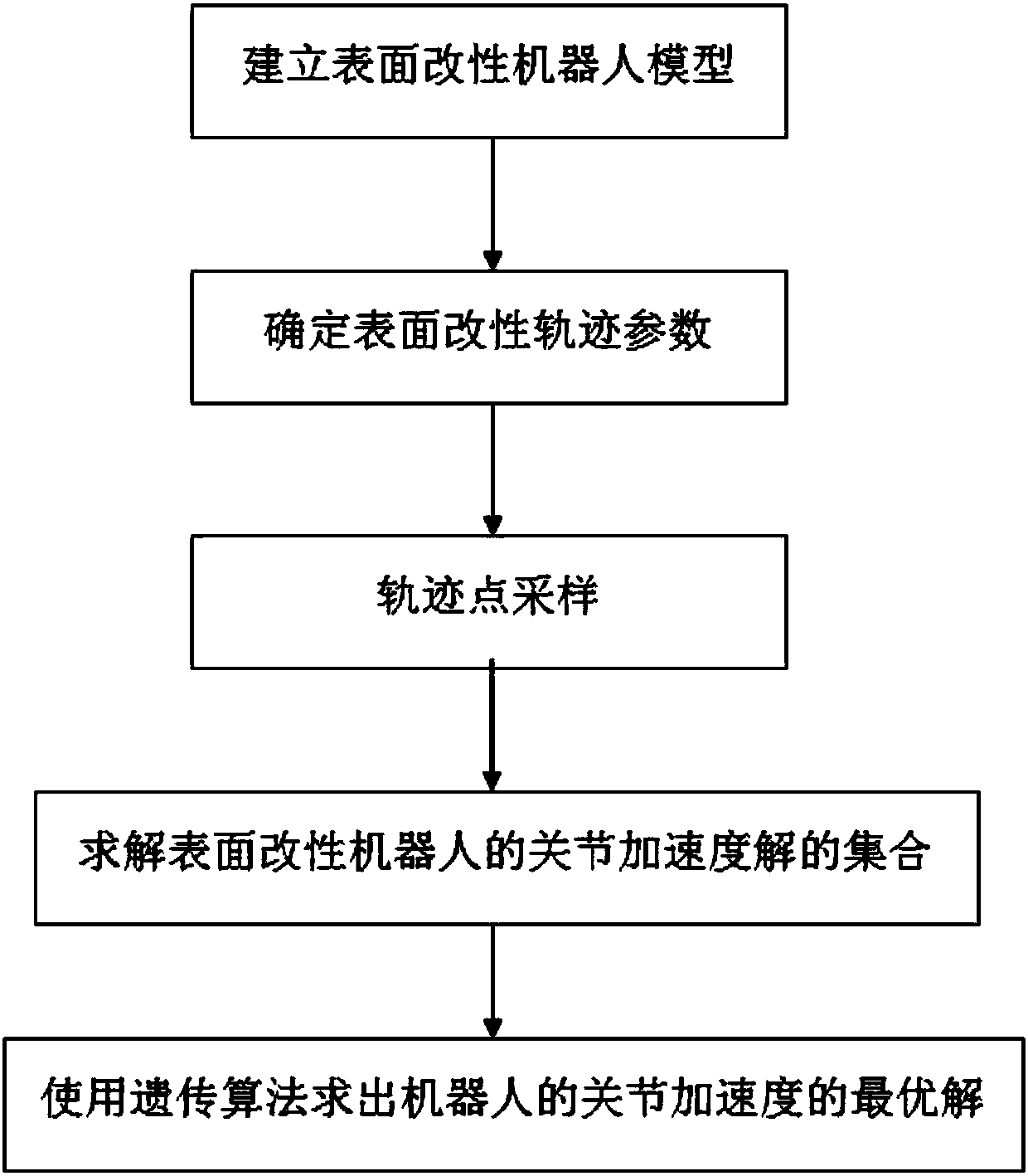
[0059] See figure 1 , A method for optimizing the joint space trajectory of a surface-modified robot, including the following steps;
[0060] S1: Establish a surface modification robot model;
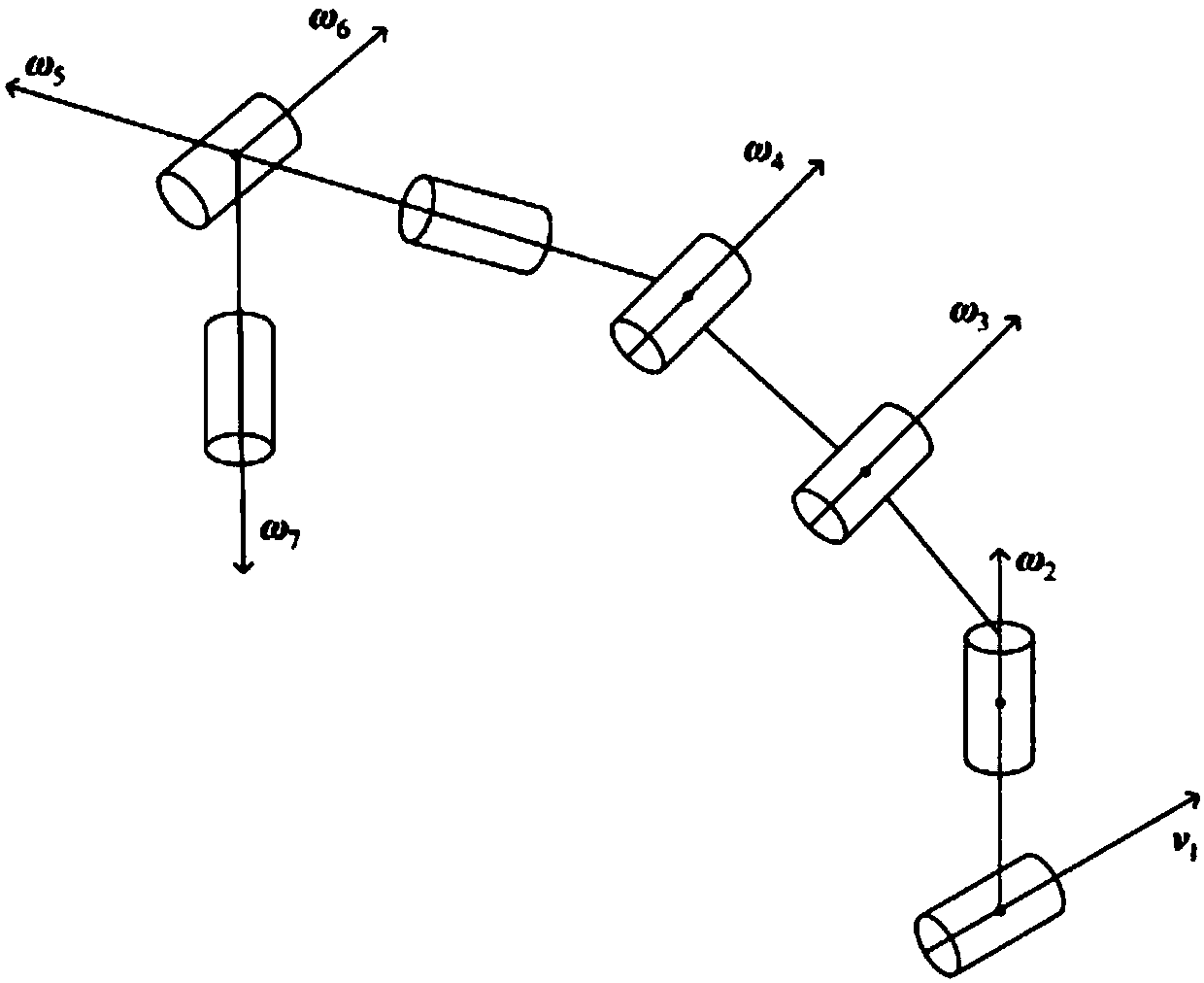
[0061] See figure 2 The surface modification robot model is a seven-degree-of-freedom execution robot model, the first joint is a moving joint, and the rest are rotating joints.
[0062] S2: Determine the surface modification track parameters,
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More