

Control system based on Arduino platform, for hexapod robot
A hexapod robot and control system technology, applied in the control field of intelligent robots, can solve the problems of high degree of freedom of bionic structure of hexapod robot, difficult to control, difficult development of intelligent autonomous operation system, and single control method, etc. The effect of optimization, reduction of control difficulty, and real-time control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
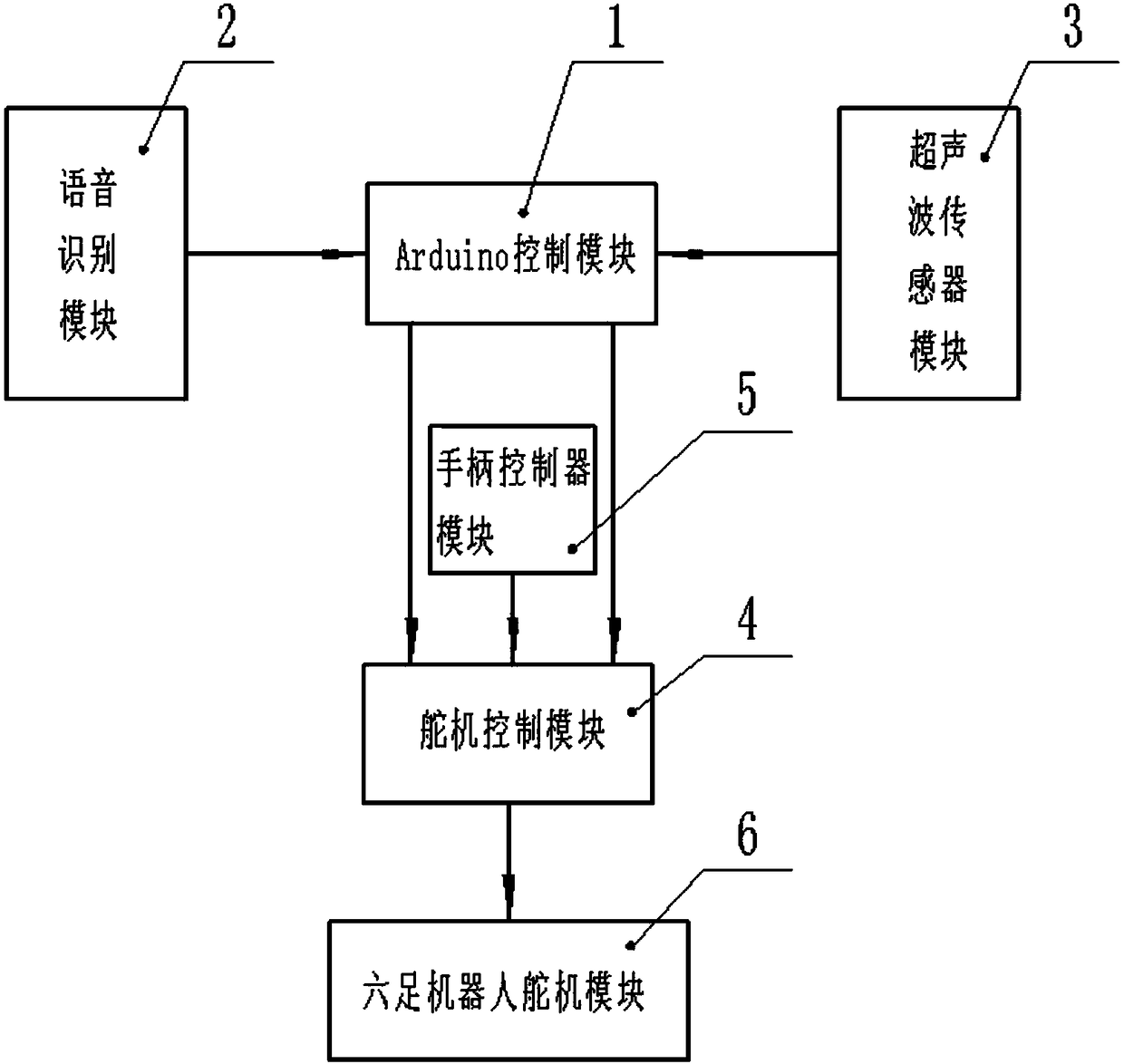
[0025] Such as figure 1 As shown, the hexapod robot control system based on the Arduino platform includes an Arduino control module 1, a voice recognition module 2, an ultrasonic sensor module 3, a steering gear control module 4, a handle controller module 5, and a hexapod robot steering gear module 6.
[0026] The output signal of the speech recognition module 2 is connected with the second input signal of the Arduino control module 1 .
[0027] The output signal of the ultrasonic module 3 is connected to the third input signal of the Arduino control module 1 .
[0028] The input signal of the steering gear control module 4 is connected with the first output ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More