

Design method of auto disturbance rejection controller with anti-integral compensation function
A technology of active disturbance rejection controller and design method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of actuator saturation, small estimation error, etc., and achieve the effect of good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described below in conjunction with the accompanying drawings.
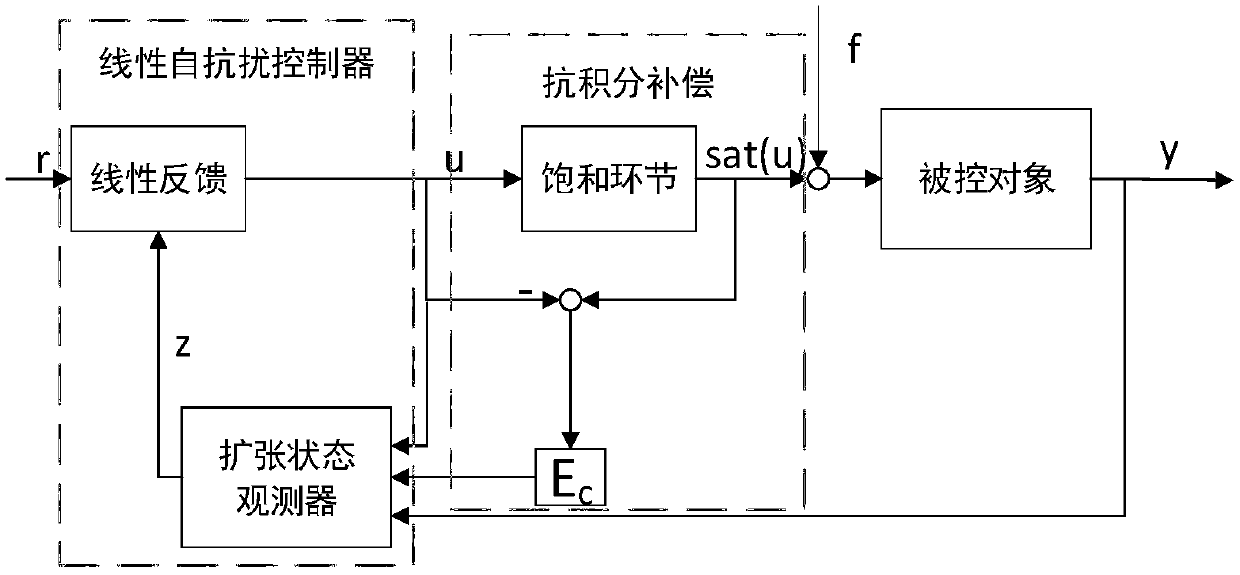
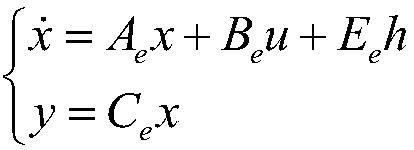
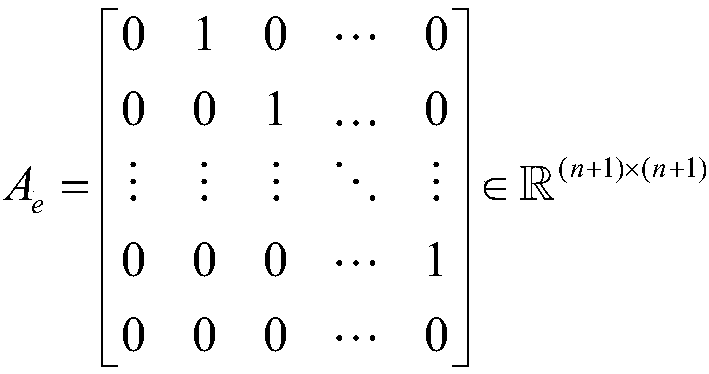
[0055]The controller design solution adopted in the present invention is to use anti-integral compensation to improve the dynamic performance of the closed-loop system under the condition of actuator saturation. The specific implementation method is as follows: first establish a nonlinear system model, which is in the form of an integral chain, and convert it into a state space model, then design a corresponding extended state observer with anti-integral compensation, and design a linear state on this basis Feedback control law to complete the control task of the system. In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described below from several aspects such as the establishment of ADRC with anti-integral compensation, design principles, and solution methods.
[0056] The design m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More