

Method for determining flight strategy of unmanned aerial vehicle, unmanned aerial vehicle, and ground device
A technology of flight strategy and ground equipment, applied in the field of control, can solve problems such as loss of drones, bombing, affecting user experience, etc., to achieve the effect of improving flight experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
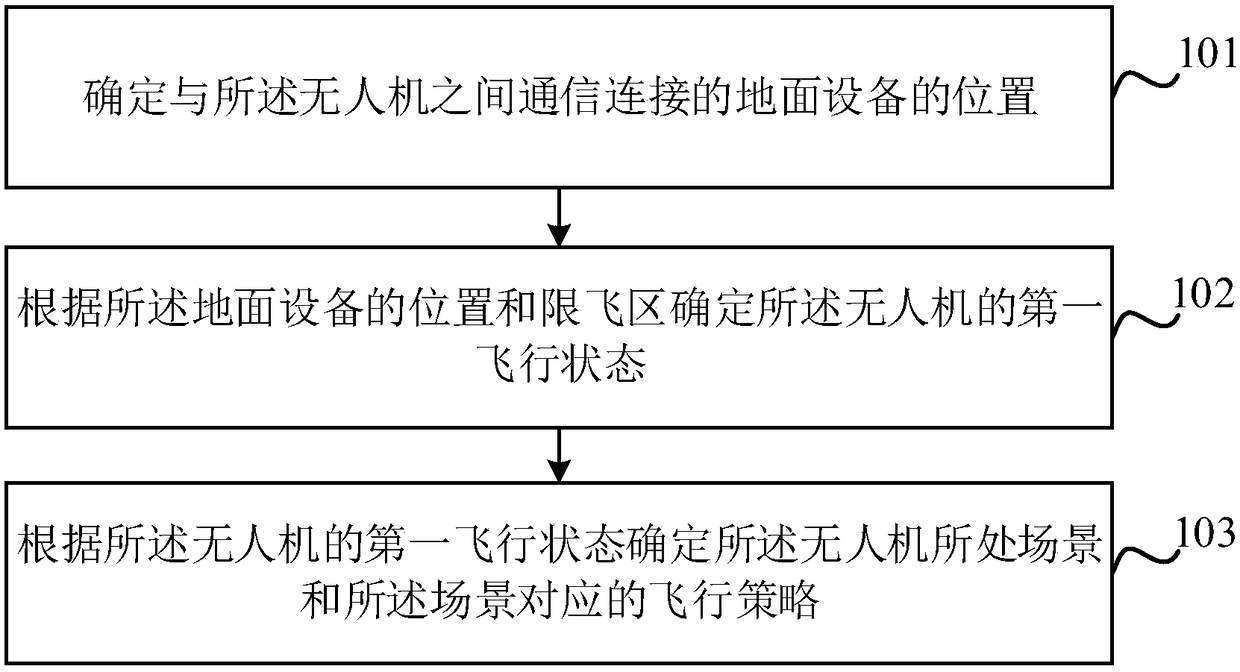
[0051] figure 1 It is a schematic flowchart of the method for determining the flight strategy of the drone provided by an embodiment of the present invention. see figure 1 , this method can be applied to UAVs as well as ground equipment. On the side of application to drones, the method includes:
[0052] Step 101, determine the location of the ground equipment that is in communication with the UAV.
[0053] In the embodiment of the present invention, the ground device is a control terminal or a terminal provided with an APP for controlling the drone.
[0054] For example, when the ground device is a control terminal, the control terminal communicates with the UAV, and sends its own position to the UAV through the communication connection.
[0055] For another example, when the control terminal cannot obtain its own location, it can also read the location of an intelligent terminal (such as a mobile phone) connected to it as its own location. Usually, the distance between ...
Embodiment 2
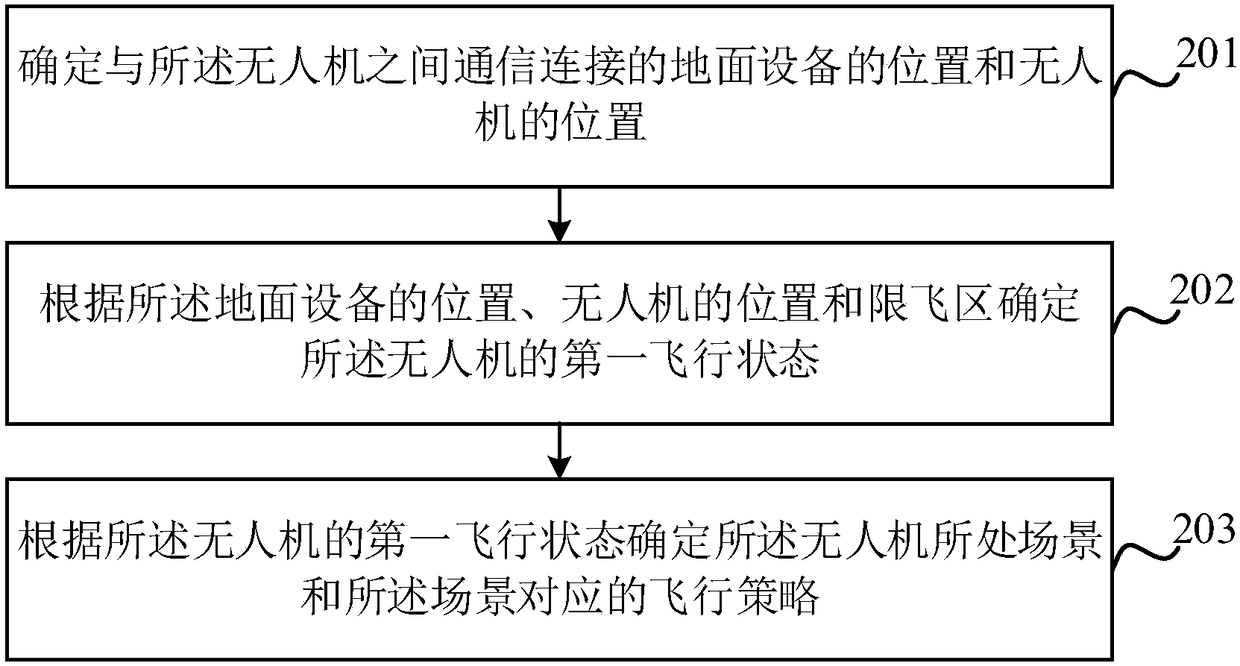
[0073] In the first embodiment, if the first position is outside the no-fly zone, in the height limit zone, outside the height limit zone, or the position is unknown, the UAV can be controlled according to the set flight strategy. However, the position of the drone is uncertain, and the first flight state of the drone cannot be determined. In order to solve this technical problem, an embodiment of the present invention provides a method for determining the flight strategy of the drone. The method combines the location of the ground equipment (first location) and the location of the drone to determine a first flight state. figure 2 It is a schematic flowchart of the method for determining the flight strategy of the drone provided by an embodiment of the present invention. see figure 2 , the method includes:
[0074] Step 201, determine the location of the ground equipment and the location of the UAV connected to the UAV
[0075] In this embodiment, to determine the positi...
Embodiment 3
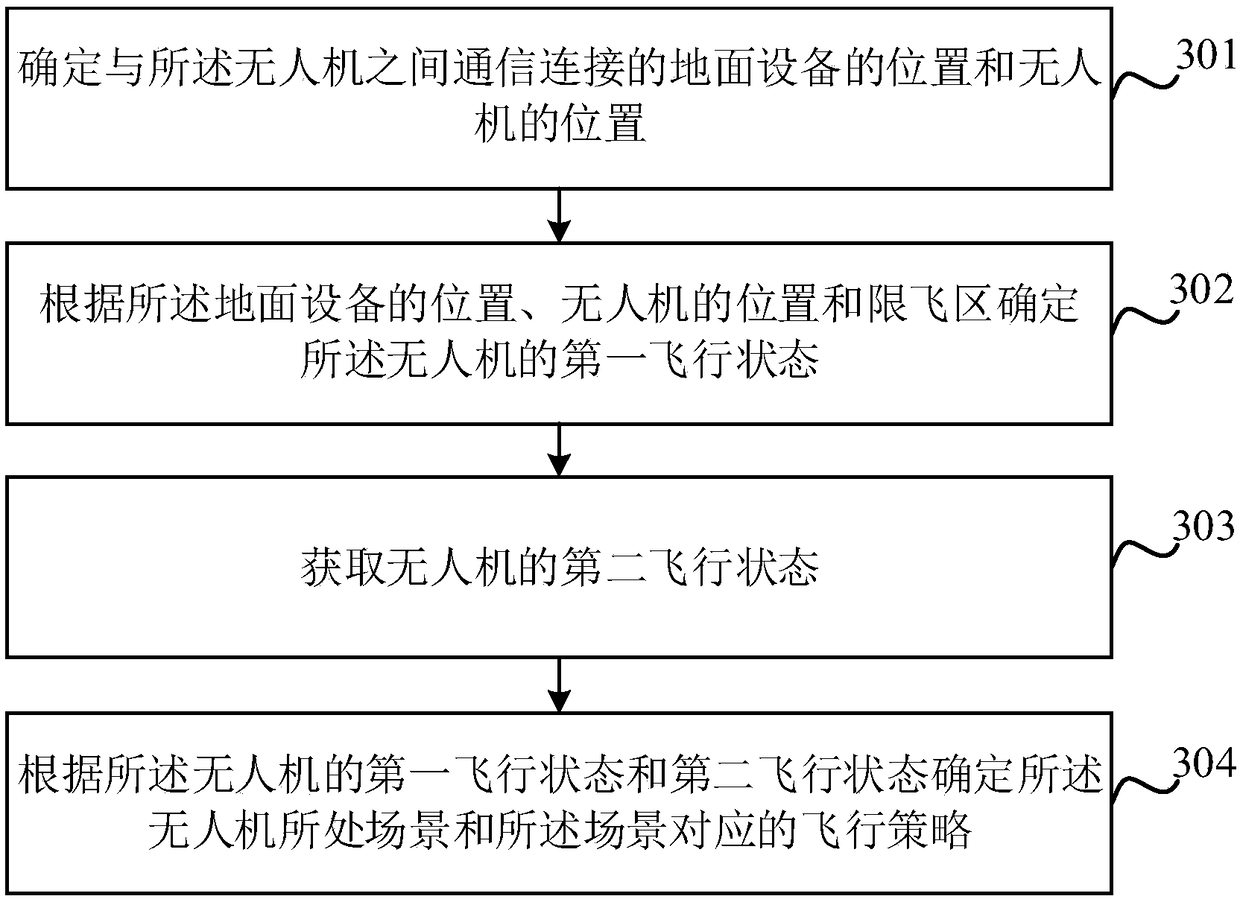
[0110] In the second embodiment, for the case where the first flight state is a safe state, a safe state with a height limit, or an unknown state, the position of the corresponding drone is unknown. If the preset flight strategy is adopted, unexpected situations may still occur to the drone. To this end, this embodiment also provides a method for determining the flight strategy of the drone in combination with the first flight state and the last flight state (hereinafter referred to as the second flight state), because the speed of the drone is limited, the first The correlation between the first flight state and the second flight state is very large, and the possibility of a sudden change in the scene of the UAV is relatively small, so that the scene of the UAV can be accurately determined through the first flight state and the second flight state. Thereby reach the purpose of solving the above-mentioned technical problems. image 3 It is a schematic flowchart of the method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More