

Adaptive control method for four-rotor aircraft based on enhanced bipower reaching law of inverse proportional function and rapid terminal sliding mode surface
A technology of quadrotor aircraft and terminal sliding mode, which is applied in the direction of adaptive control, general control system, control/regulation system, etc. It can solve the problem of inability to achieve limited time control, speed up the approach speed of the approach law, reduce chattering, etc. problem, to avoid the singularity problem, speed up the approach speed, and reduce chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings.
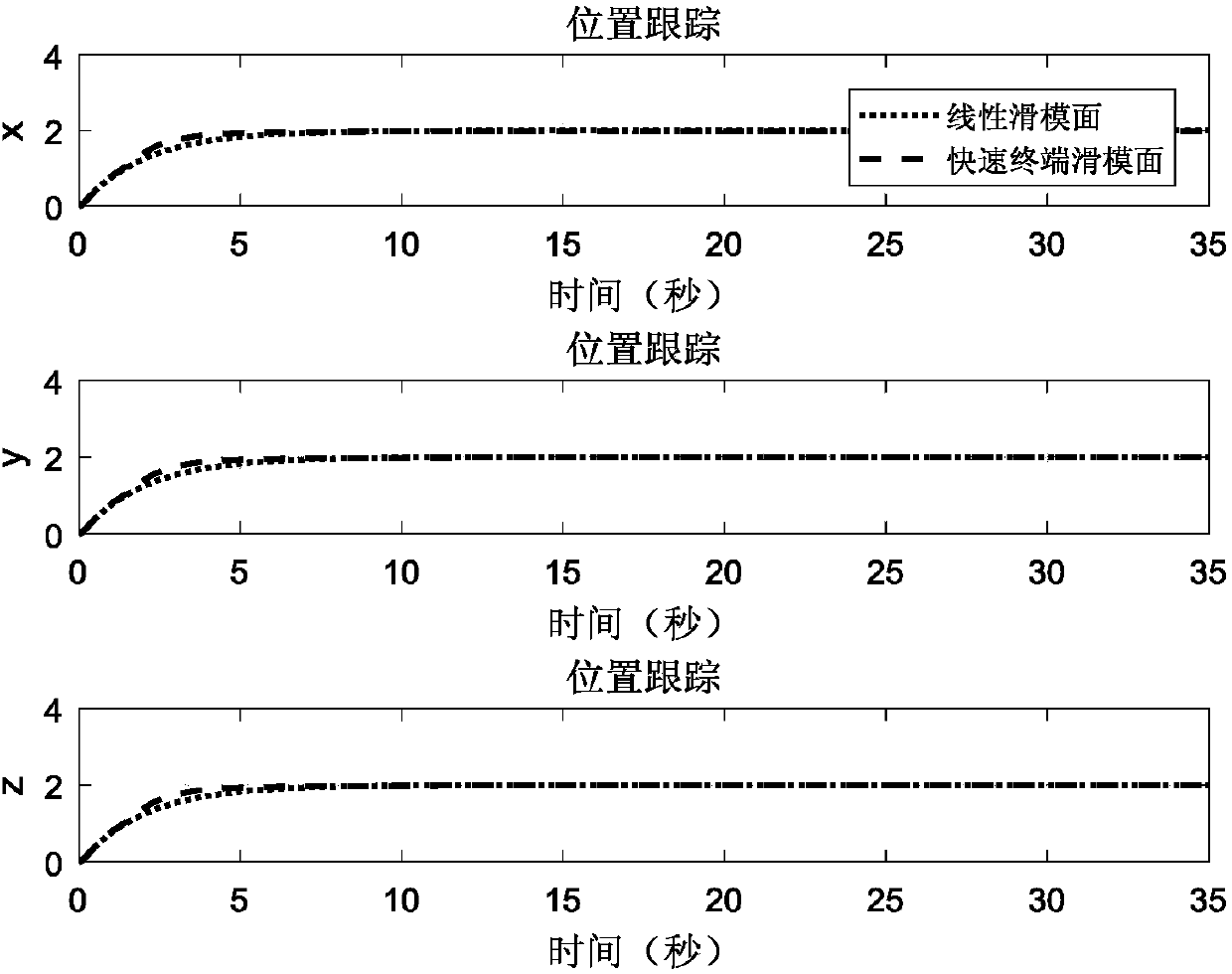
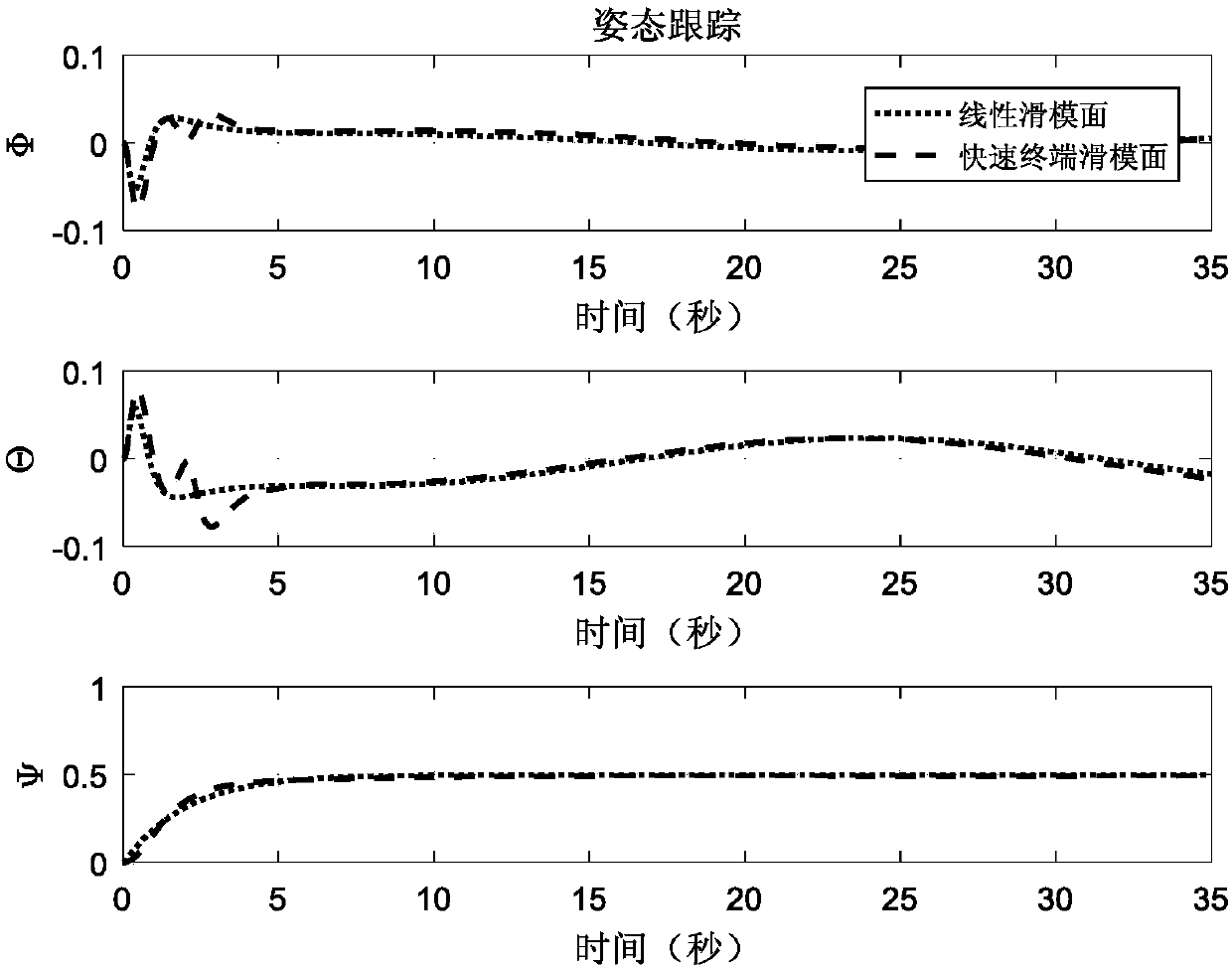
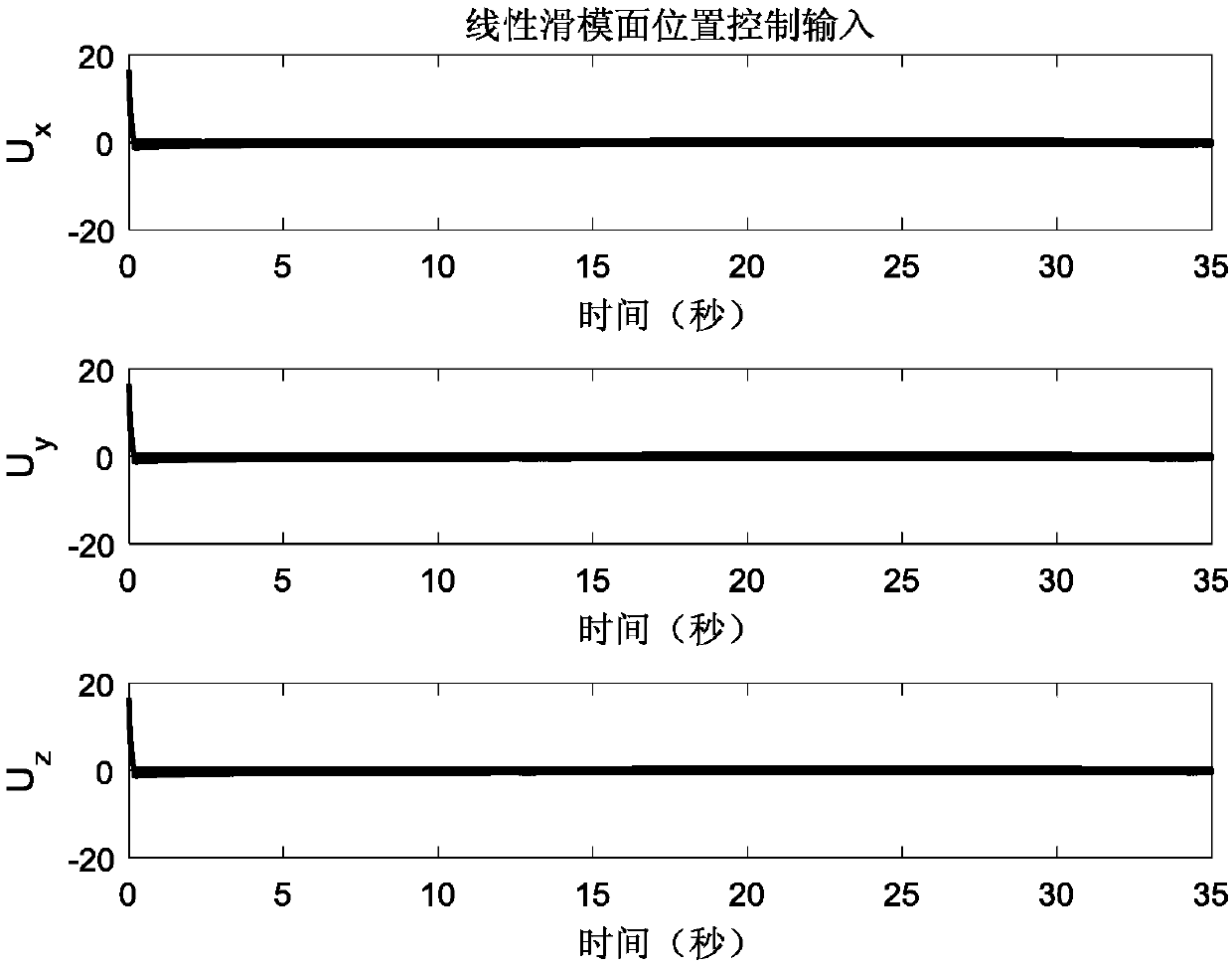
[0076] refer to Figure 1-Figure 11 , an adaptive control method for a quadrotor aircraft based on an inverse proportional function enhanced double power reaching law and a fast terminal sliding surface, including the following steps:
[0077] Step 1, determine the transfer matrix from the body coordinate system based on the quadrotor aircraft to the inertial coordinate system based on the earth;
[0078]
[0079] Among them, ψ, θ, and φ are the yaw angle, pitch angle, and roll angle of the aircraft, respectively, indicating the rotation angle of the aircraft around each axis of the inertial coordinate system in turn, and T ψ represents the transition matrix of ψ, T θ Denotes the transition matrix of θ, T φ Represents the transition matrix of φ;
[0080] Step 2, analyze the quadrotor aircraft dynamics model according to the Newton Euler formula, the process is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More