

Nano type drone target tracking method based on concentric circles
A UAV, concentric circle technology, applied in non-electric variable control, instruments, attitude control and other directions, can solve the problems of tracking failure, increase the amount of calculation, recognition errors, etc., to achieve stable tracking, low price, and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention proposes a nano-UAV target tracking method based on concentric circle features. The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. The technical solutions in the embodiments of the present invention are clearly and completely described, and it is obvious that the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
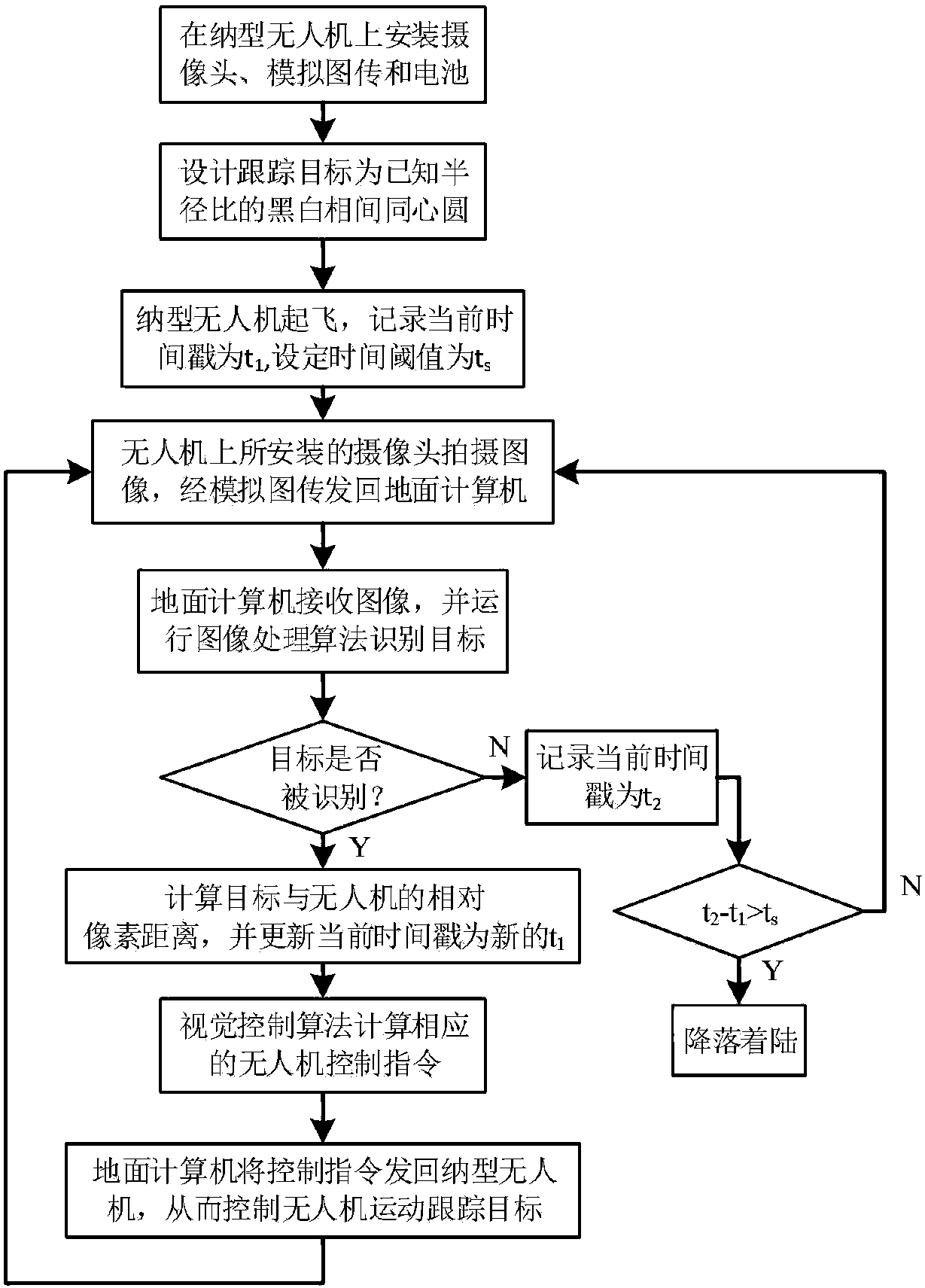
[0044] The present invention proposes a nano-UAV target tracking method based on concentric circle features, the overall process is as follows figure 1 shown, including the following steps:
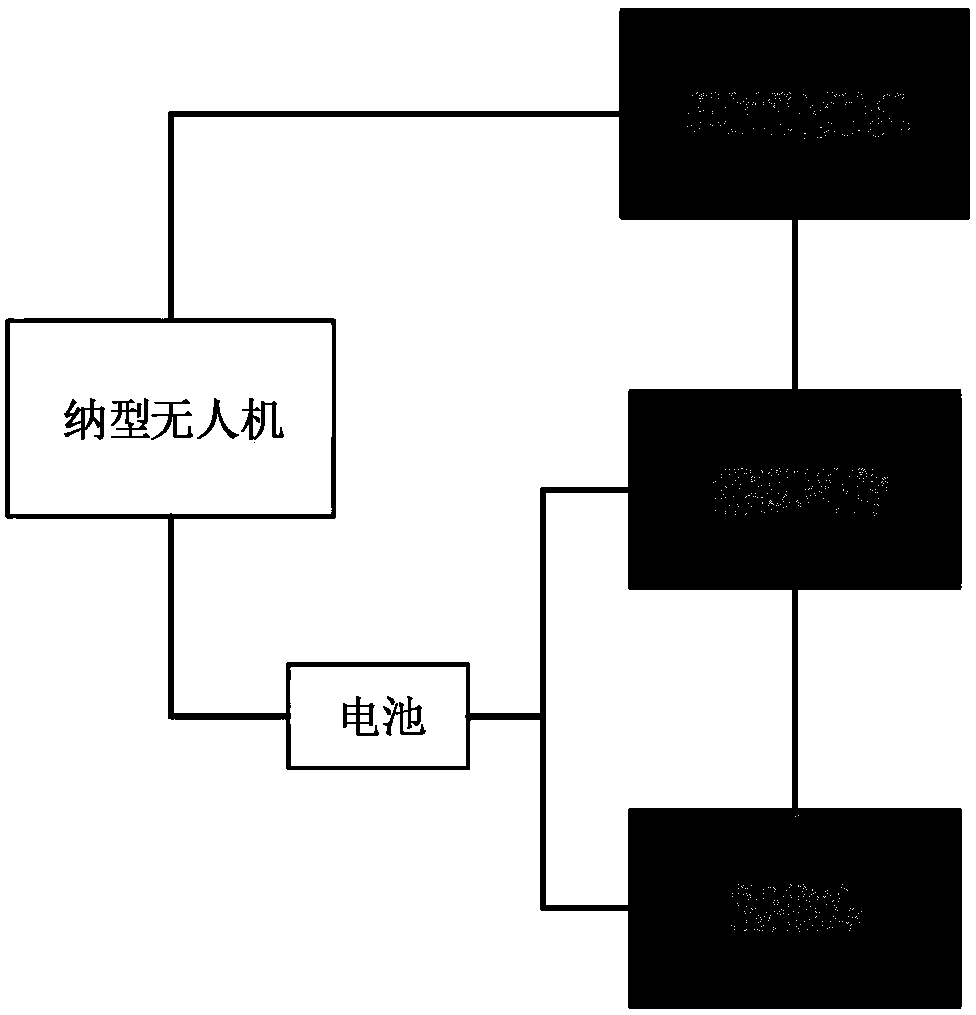
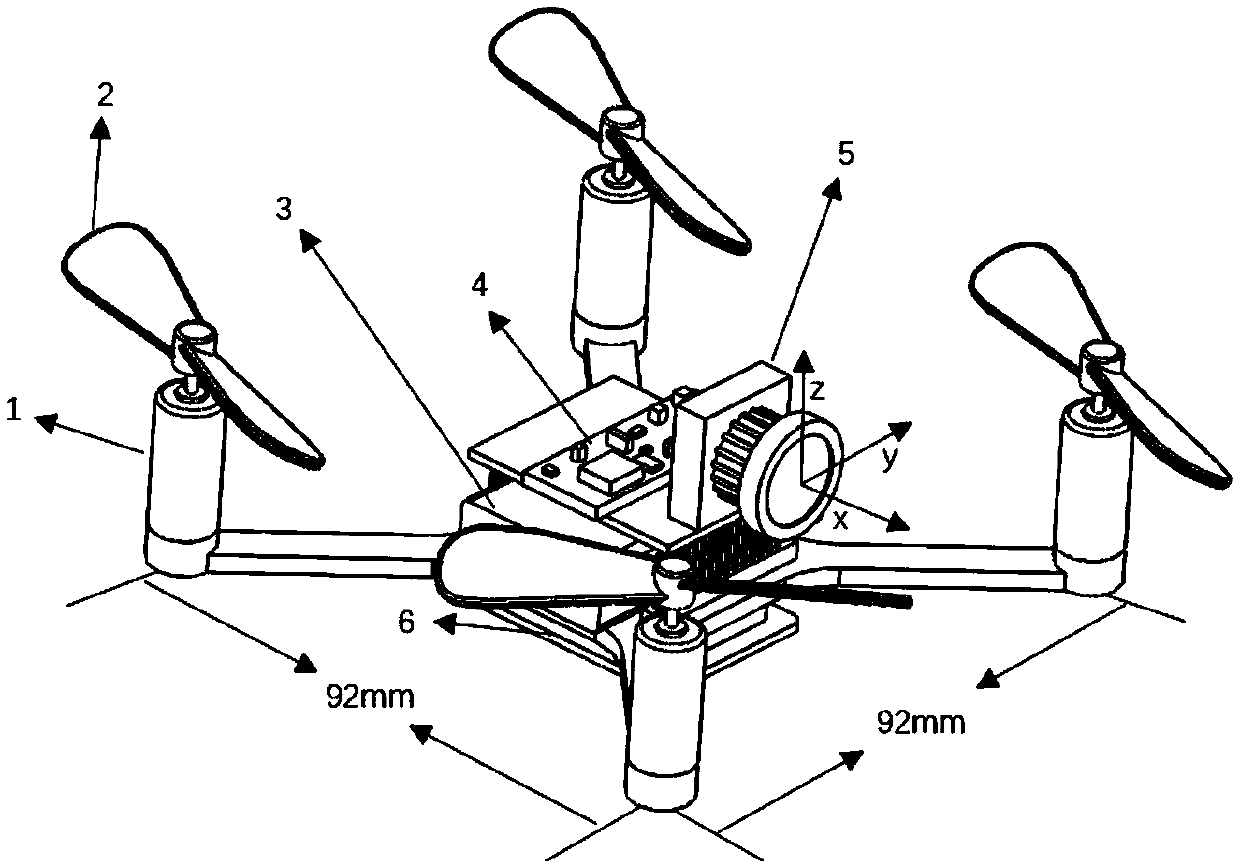
[0045] (1) Install the camera, analog video transmission and battery on the nano-UAV. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More