

Mechanical arm with tremble inhibiting function
A mechanical arm and functional technology, applied in the field of rehabilitation robots, can solve the problems of large overall structure and size of the mechanical arm wrist, small wrapping angle of the small synchronous pulley, and difficult to determine the central moment, so as to achieve compact structure, large transmission ratio and high driving force. high torque effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
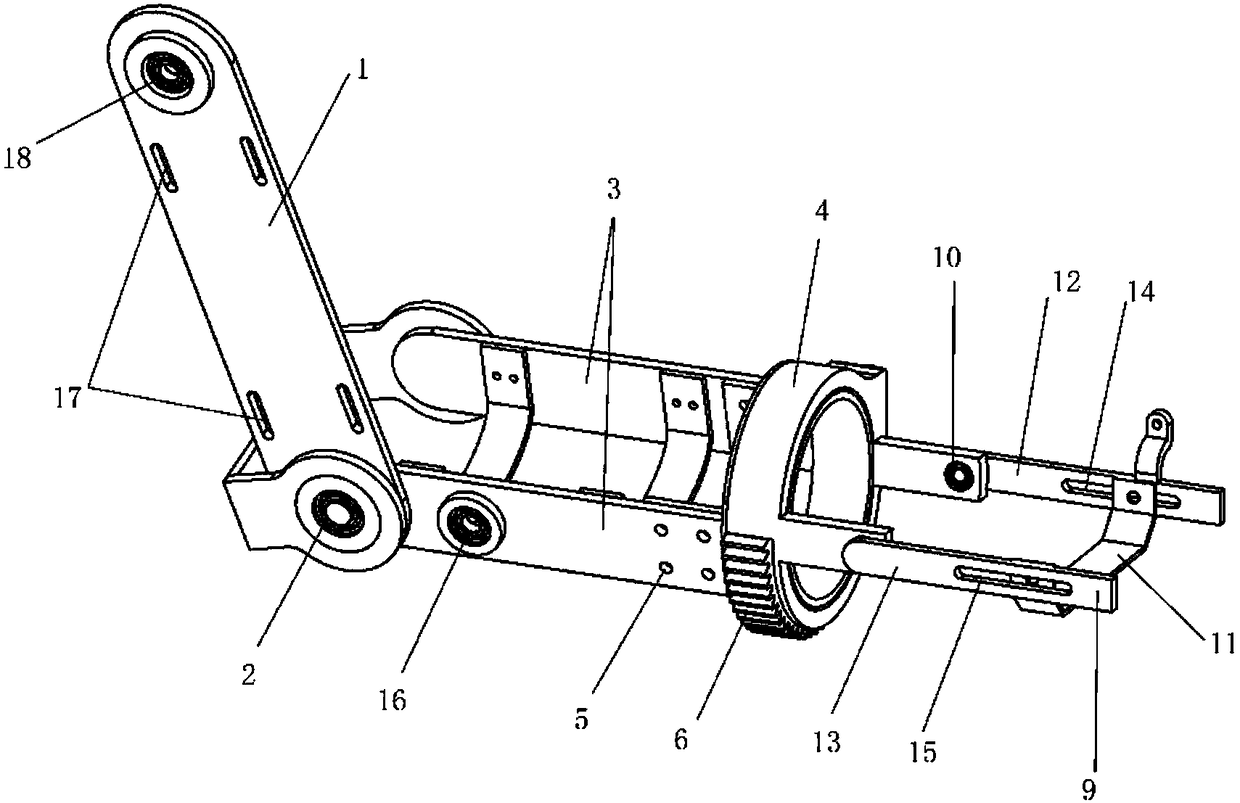
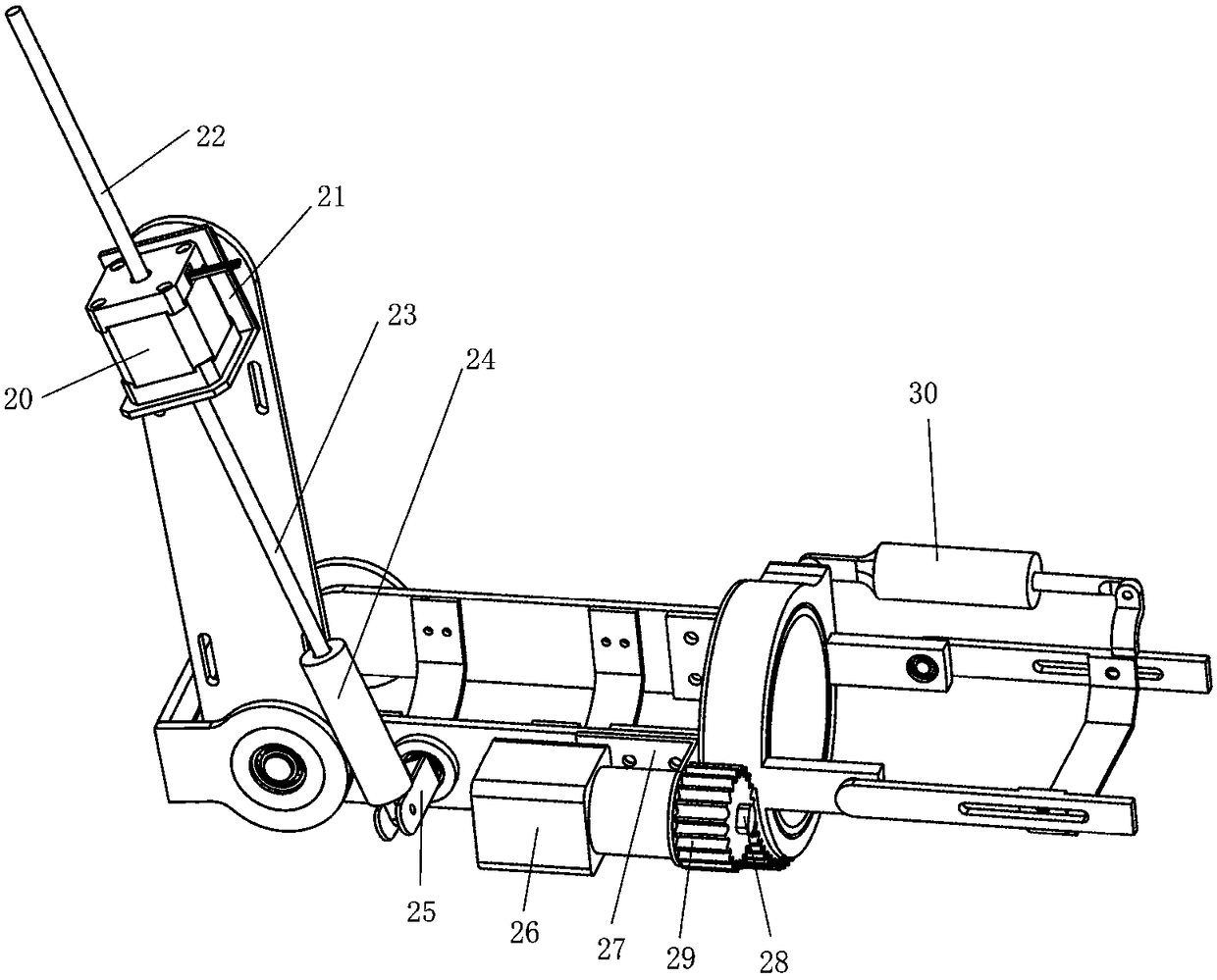
[0027] This embodiment is a mechanical arm with vibration suppression function.
[0028] Refer to Figure 1~Figure 8 The mechanical arm with tremor suppression function of this embodiment consists of a big arm 1, a forearm 3, a wrist joint 4, a grip lever 11, a first side lever 12, a second side lever 13, a linear motor 20, a piston rod 23, and a magnetic The rheological damper 24, the connecting frame 25, the stepping motor 26, the gear 29 and the hydraulic rod 30 are composed; among them, one end of the big arm 1 and the forearm 3 are connected by a U-shaped piece and a deep groove ball bearing 2 to form a rotating joint pair ; Boom 1 is in the shape of a long thin plate with rounded arcs at both ends. There are second bearing holes on both ends of the boom 1. There are symmetrical slots 17 along the axis on both sides of the boom 1, passing through the slots 17 and the human body Tighten the arm straps. The second bearing hole 18 at the other end of the boom 1 is matched wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More