

PMSM position servo system high-order object controller design and parameter determination method
A servo system and design method technology, applied in the field of servo system control, can solve the problems that the second-order model cannot reflect the relevant physical characteristics well, and cannot reflect the influence of changes in current loop parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the above objects, features and advantages of the present invention more comprehensible, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
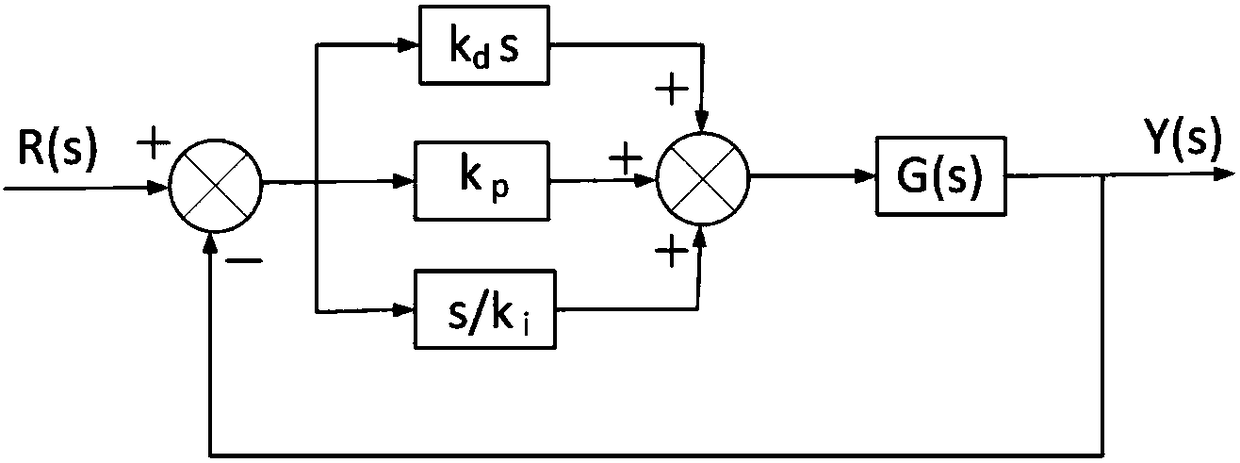
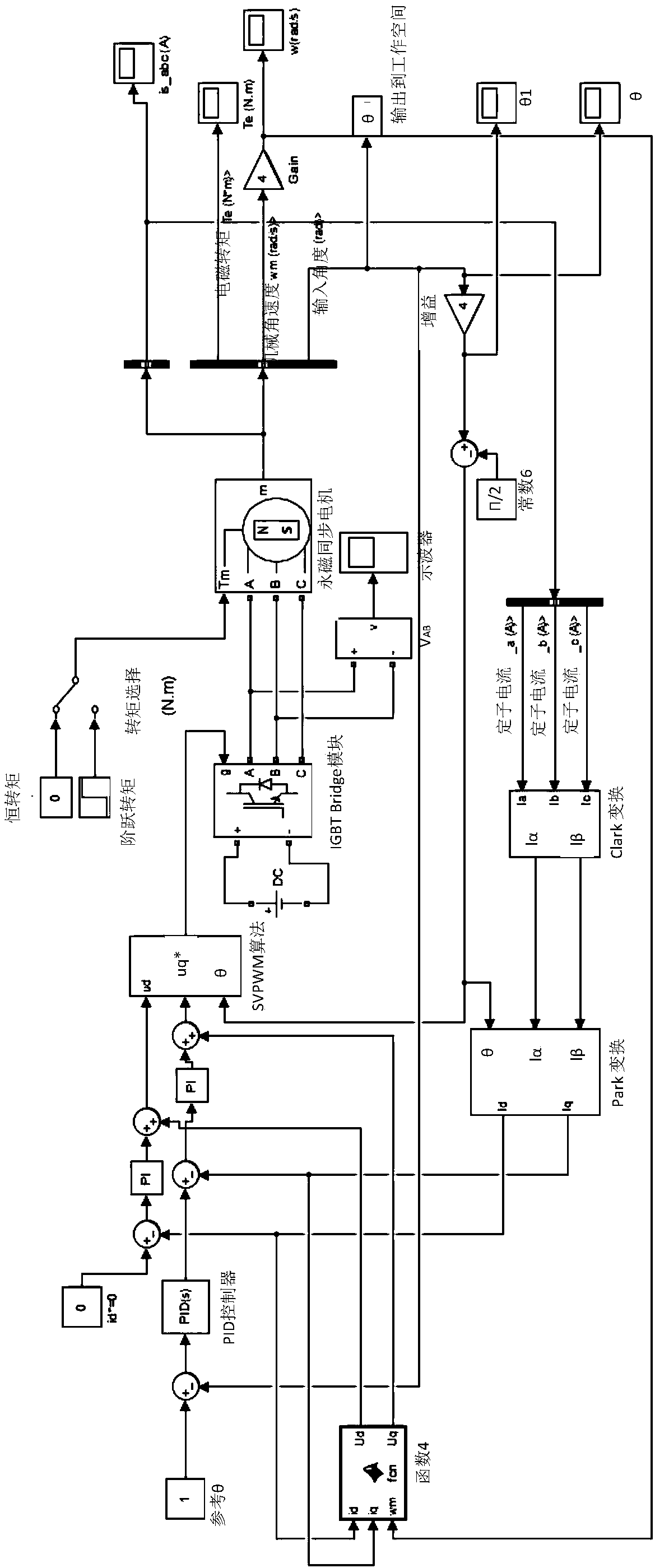
[0035] The design and parameter determination method of the PMSM position servo system controller based on pole configuration provided by the present invention is mainly divided into three major steps: modeling of high-order objects of the position loop, design of the controller and parameter setting, and determination of PID through simulation analysis Controller parameters.
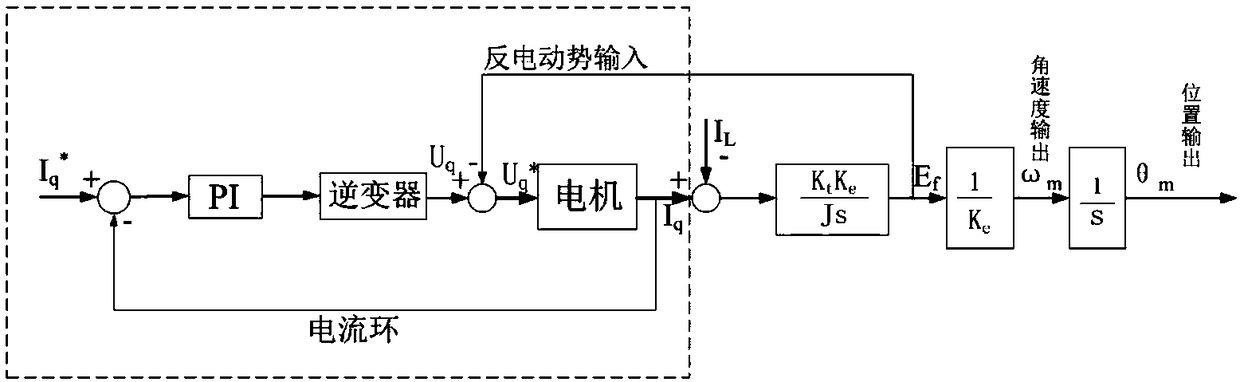
[0036] (1) Modeling of high-order objects in the position loop
[0037] Assuming that the saturation of the iron core is ignored, the eddy current and hysteresis loss are not calculated, and the induced electromotive force in the motor is a sine wave, then in the d-q coordinate system, the stator voltage equation of PMSM can be described as:
[0038]
[0039...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More