

Operation system and method for remotely operating object gripping machines
A technology of remote operation and control system, applied in the field of interactive entertainment, can solve the problems of single gameplay, reduce the probability of winning the lottery, not easy to grab dolls, etc., to achieve the effect of improving the fun of the game
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
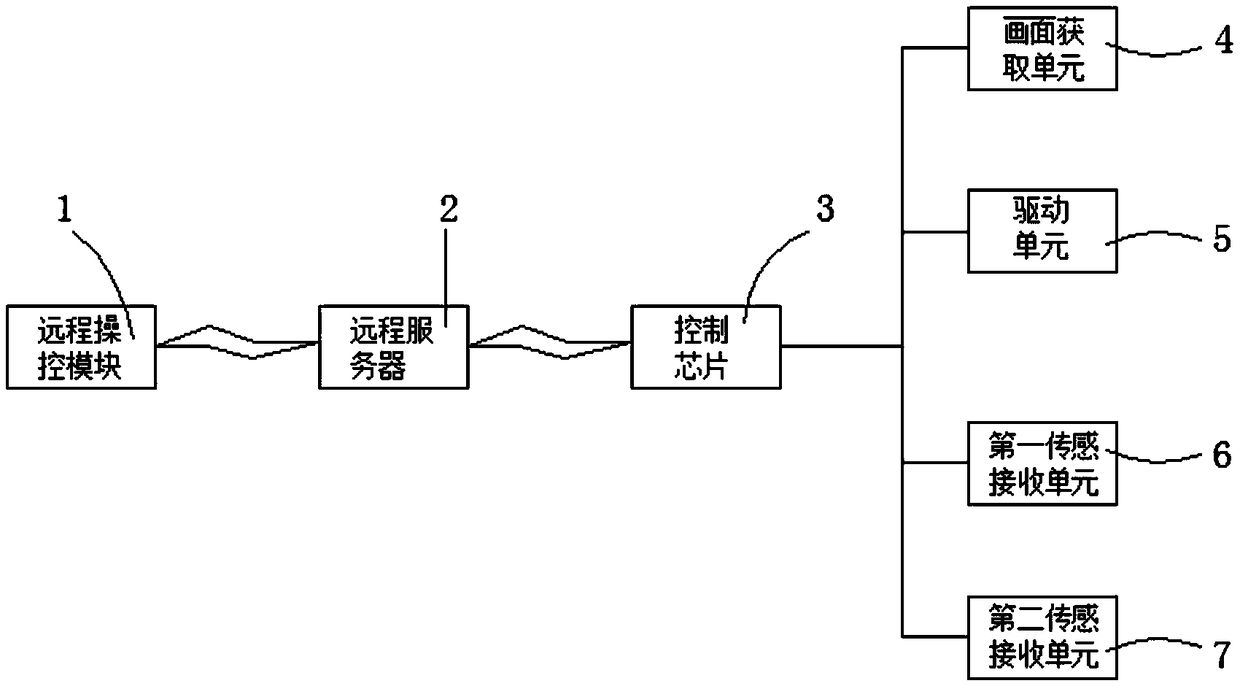
[0036] This embodiment provides a control system for remotely operating an object grabber, including at least one remote server 2, at least one remote control module 1, the remote control module 1 being a smart phone or a computer, and at least one object grabber. The remote server 2 communicates with the control chip 3 and the remote control module 1 respectively.
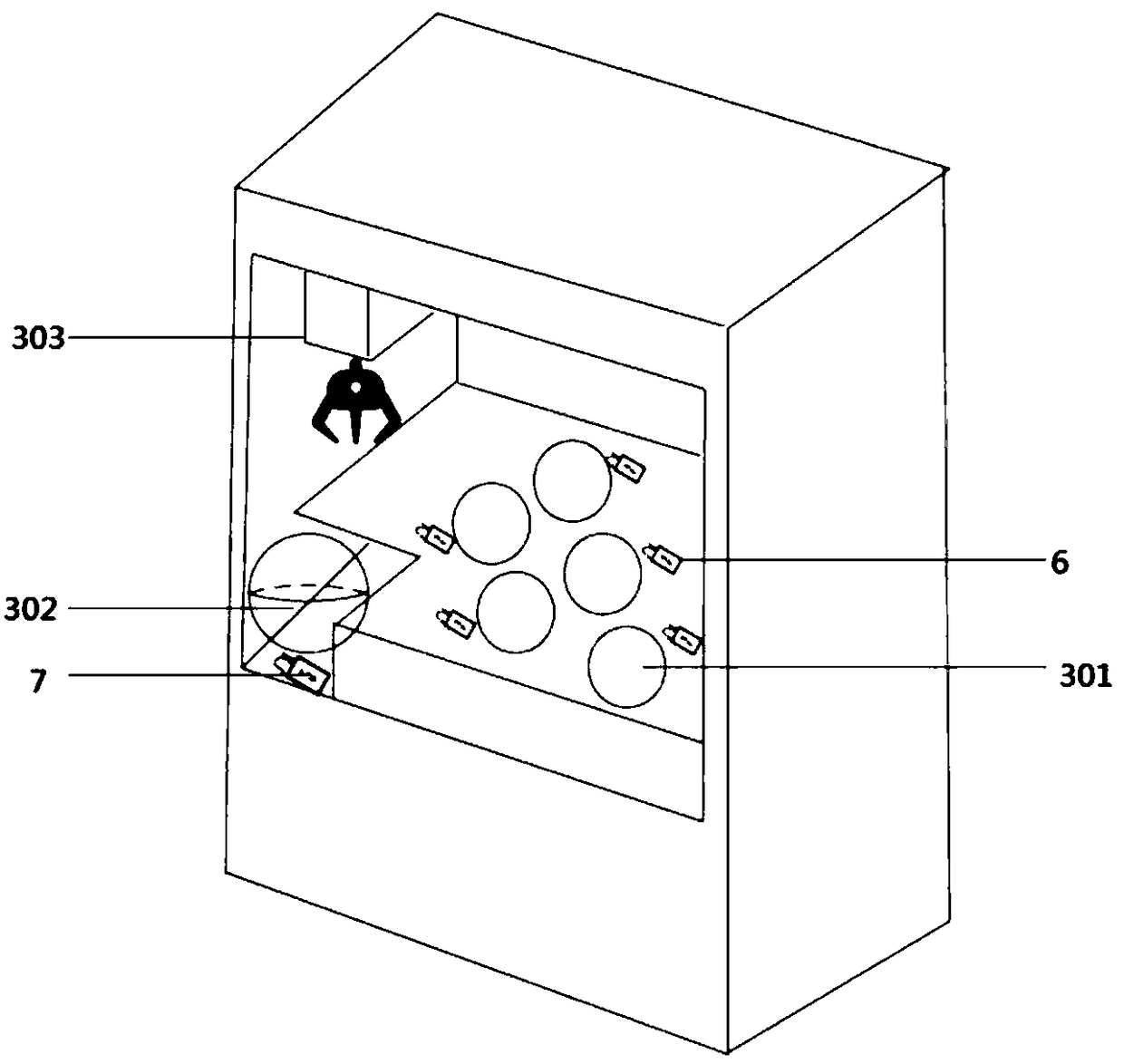
[0037] There is a control chip 3 inside the grab machine, and the control chip 3 is electrically connected to a picture acquisition unit 4 and a drive unit 5. The picture acquisition unit 4 is a camera group composed of multiple cameras, which is used to collect pictures of the working status of the picker in real time. , the driving unit 5 is used to drive the grabbing device 303 of the material grabbing machine, the grabbing device 303 can be a claw, and the driving unit can be a crane or the like.
[0038] The grabbing machine includes a ball-grabbing area, a grabbing device 303 and a ball-dropping area compose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More