

Picking robot controller based on finite state automata architecture and architectural approach
A picking robot and finite state technology, applied in picking machines, program-controlled manipulators, agricultural machinery and implements, etc., can solve the problems of poor versatility and low scalability of the control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
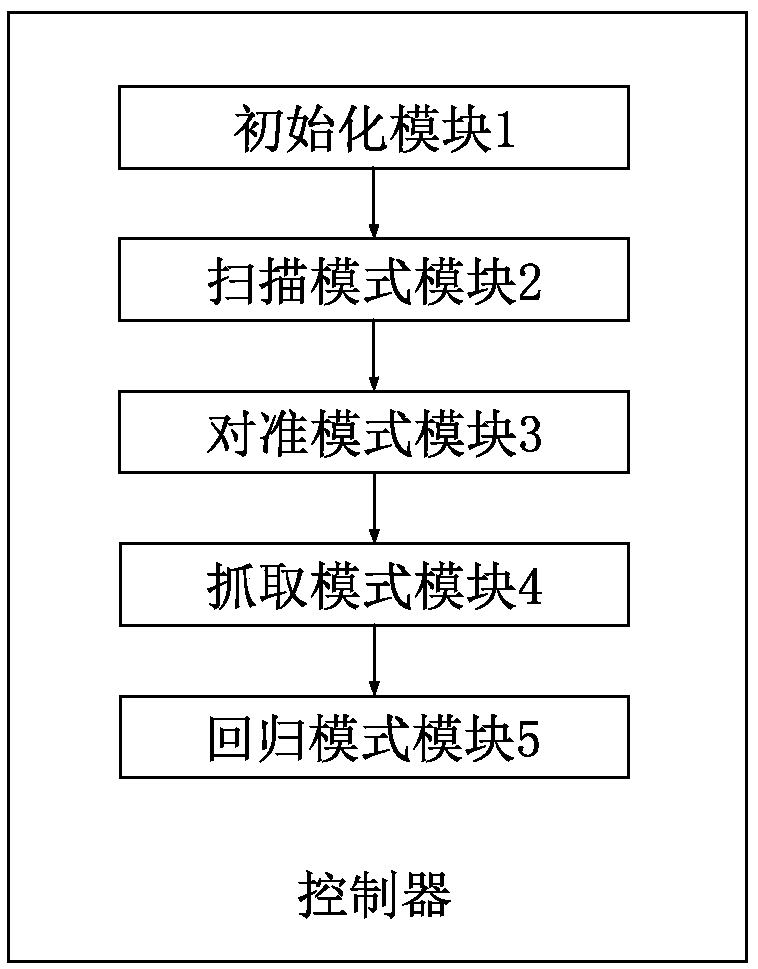
[0079] Embodiment 1 of the present invention provides a picking robot controller based on a finite state automaton architecture, such as figure 1 As shown, the controller includes:
[0080] Initialization module 1: used to initialize the system and judge whether the initialization is completed, and the initialization includes two states, namely initial state initialization S1 and secondary state initialization S1';
[0081] Scanning mode module 2: used to scan the picking target after the system initialization is completed, and judge whether there is a target, and the scanning mode includes two states, namely the initial state scanning mode S2 and the secondary state scanning mode S2';
[0082] Alignment mode module 3: used to control the picking point close to the picking target based on the existence of the target, and judge whether the target is touched, and the alignment mode includes two states, namely the initial state alignment mode S3 and the secondary state alignment ...
Embodiment 2
[0087] The picking robot controller based on the finite state automata architecture provided by Embodiment 2 of the present invention is basically the same as Embodiment 1, the difference is that the initialization module 1, the scanning mode module 2, the alignment mode module 3, the The capture mode module 4 and the return mode module 5 switch modes according to the state transition formula:
[0088] The state transition formula is:
[0089]
[0090]
[0091] Among them, E represents the condition, and A represents the action.
[0092] state transition table
[0093]
[0094]
[0095] In the present invention, the state transition formula clearly shows the switching between modes based on the current mode and conditions and actions. Through the switching between modes, the purpose of picking targets quickly and accurately can be achieved, and the state transition formula can cooperate with the state transition. Tables are used, which can more clearly show how t...
Embodiment 3
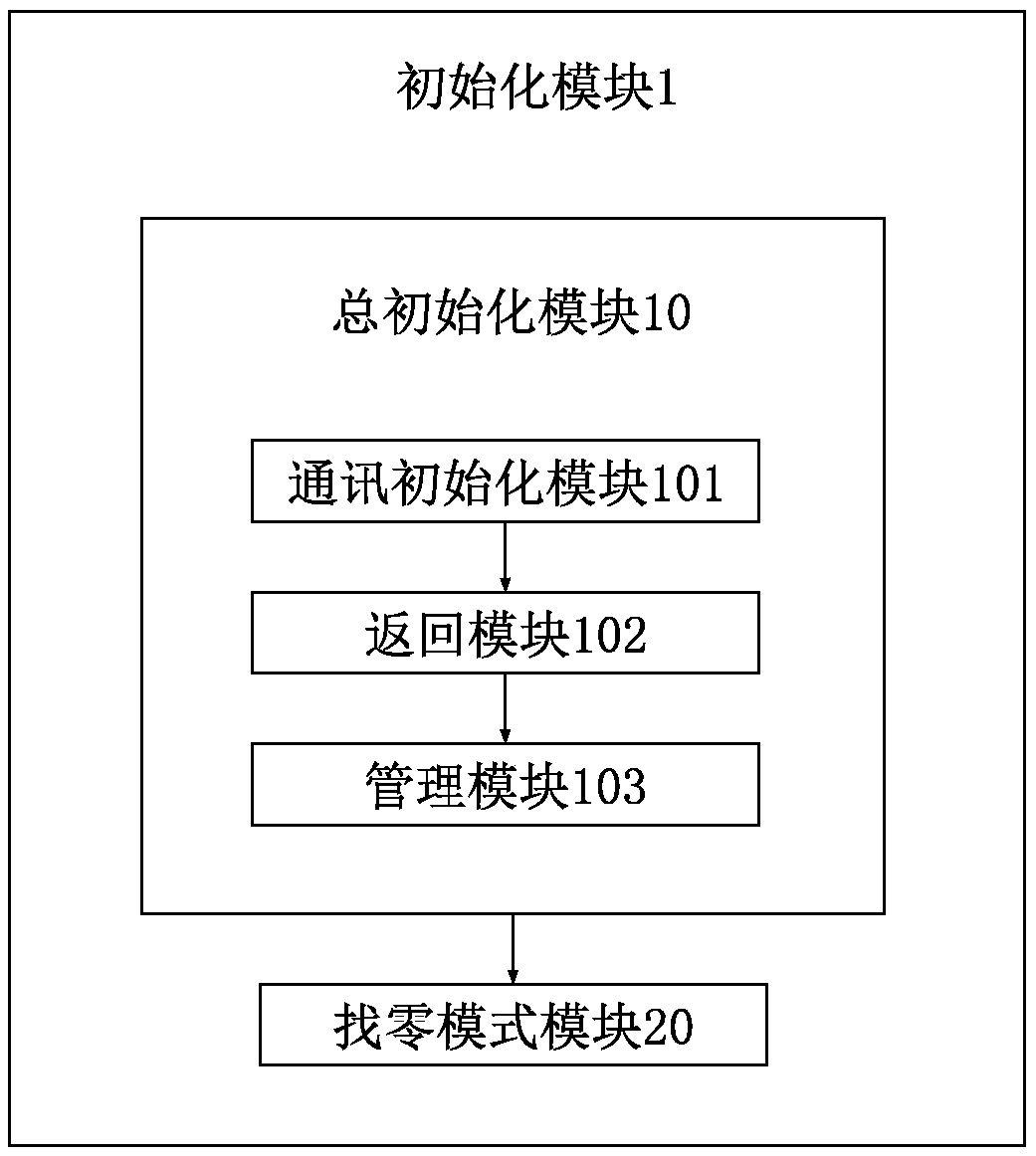
[0097] The picking robot controller based on the finite state automata architecture provided by Embodiment 3 of the present invention is basically the same as Embodiment 1, the difference is that, as figure 2 As shown, the initialization module 1 includes a total initialization module 10 and a change mode module 20, and the total initialization module 10 includes:
[0098] Communication initialization module 101: used to communicate with the upper computer, and initialize the communication module of the upper computer, and judge whether the system initialization is completed;
[0099] Return module 102: for returning to the communication initialization module 101 when the system initialization is not completed;
[0100] The management module 103 is used to initialize the global variables when the system initialization is completed, and send an instruction to the change mode module 20 after the initialization of the global variables is completed.
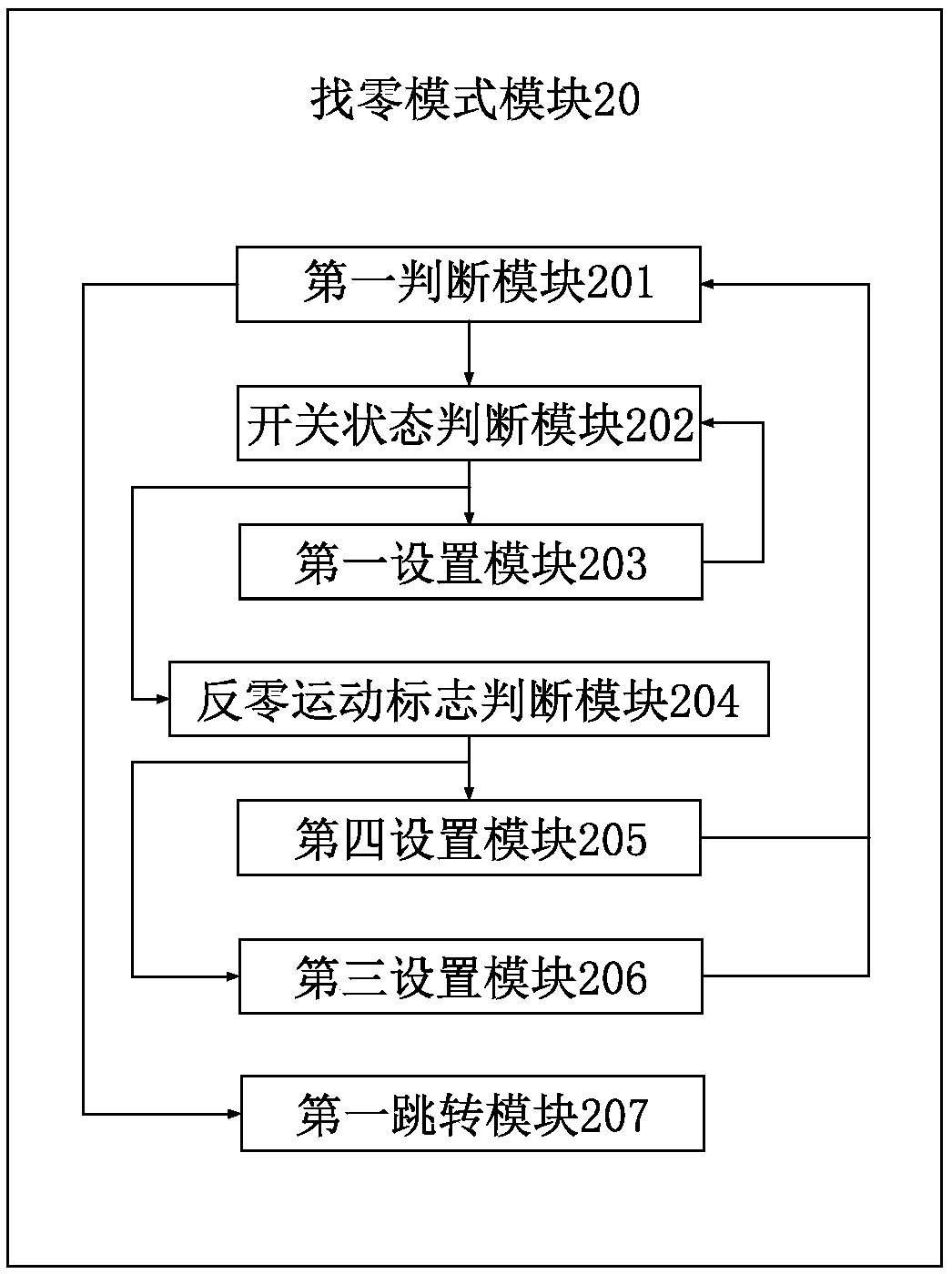
[0101] Such as image 3 As...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More