

Control method and unmanned aerial vehicle
A control method and technology of drones, applied in the field of drones, can solve the problems of lack of sharing motivation, inability to obtain high-level shooting works, low shooting value, etc., to achieve the effect of improving the user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
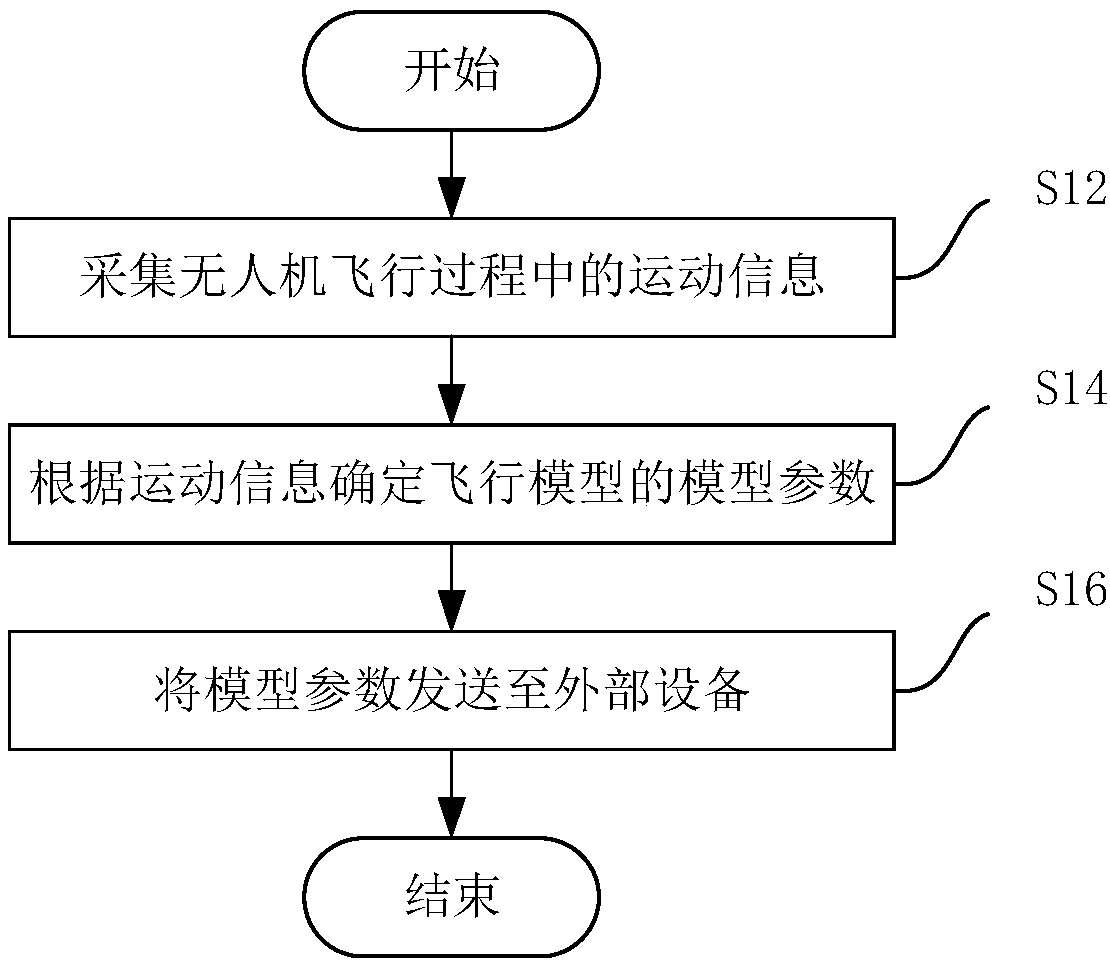
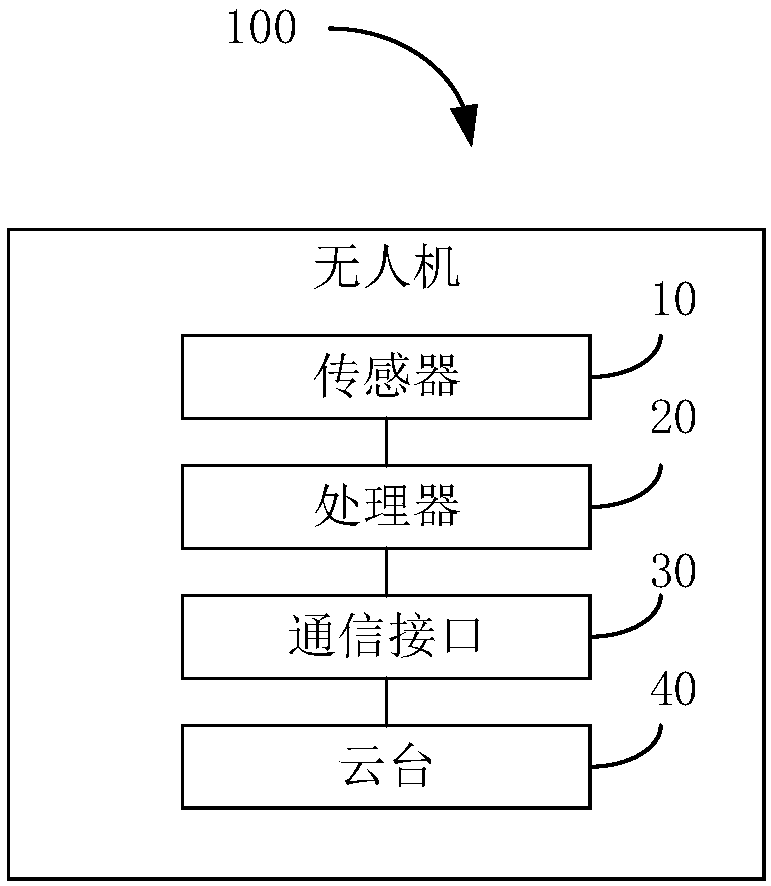
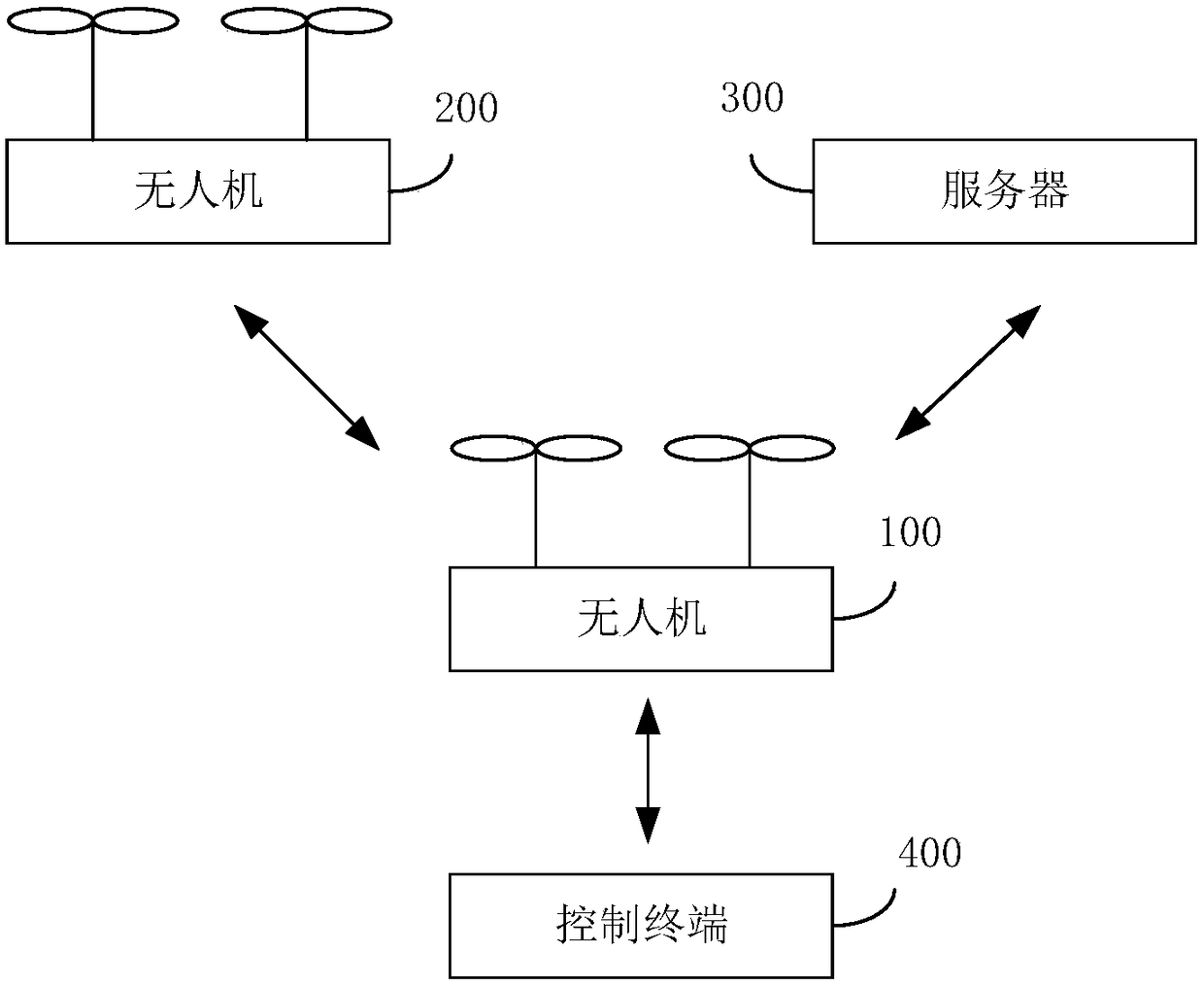
[0019] Please also refer to Figures 1 to 3 , the control method of the embodiment of the present invention is used for the drone 100 . Control methods include:
[0020] S12: Collect motion information during the flight of the UAV 100;
[0021] S14: Determine model parameters of the flight model according to the motion information; and
[0022] S16: Send the model parameters to an external device.
[0023] The control method in the embodiment of the present invention can be implemented by the UAV 100 in the embodiment of the present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More