

A mobile robot rolling grid map construction method
A technology of mobile robot and construction method, which is applied in the field of mobile robot rolling grid map construction, to achieve the effect of improving interactivity, good information integrity and accuracy, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principles of the present invention.
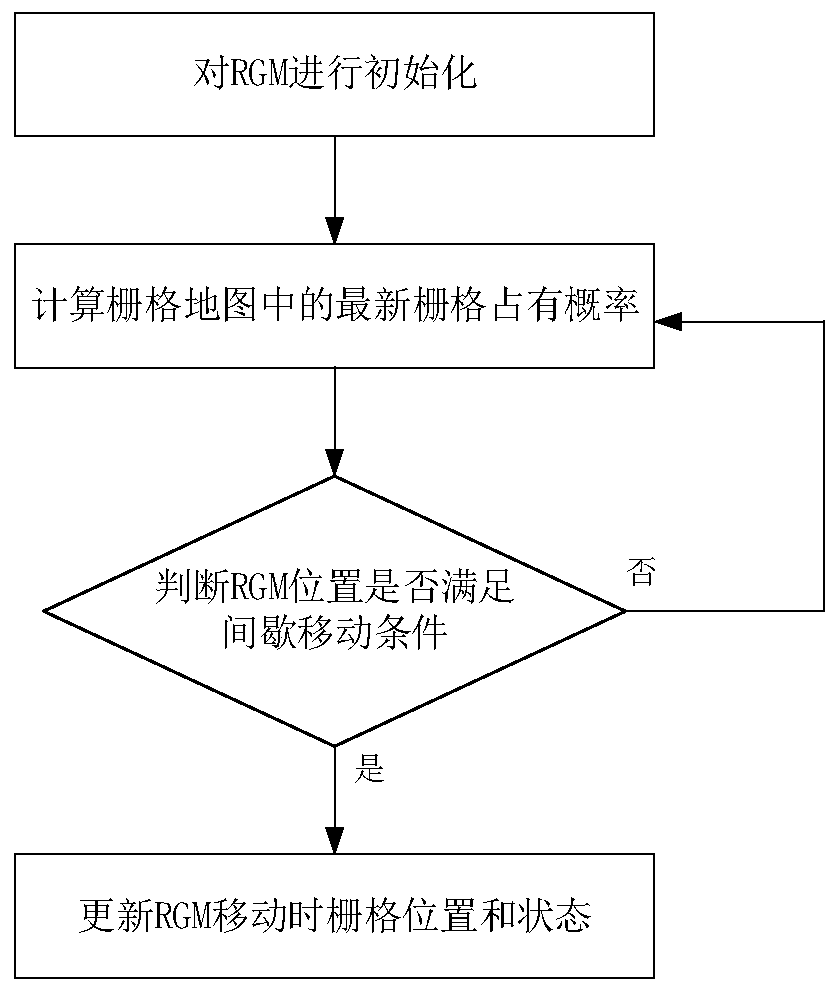
[0043] This embodiment discloses a mobile robot rolling grid map (RGM) construction method, such as figure 1 As shown, the construction method includes the following steps:
[0044] Step S1, determine the size of the RGM window, and initialize the RGM when the mobile robot starts to work;
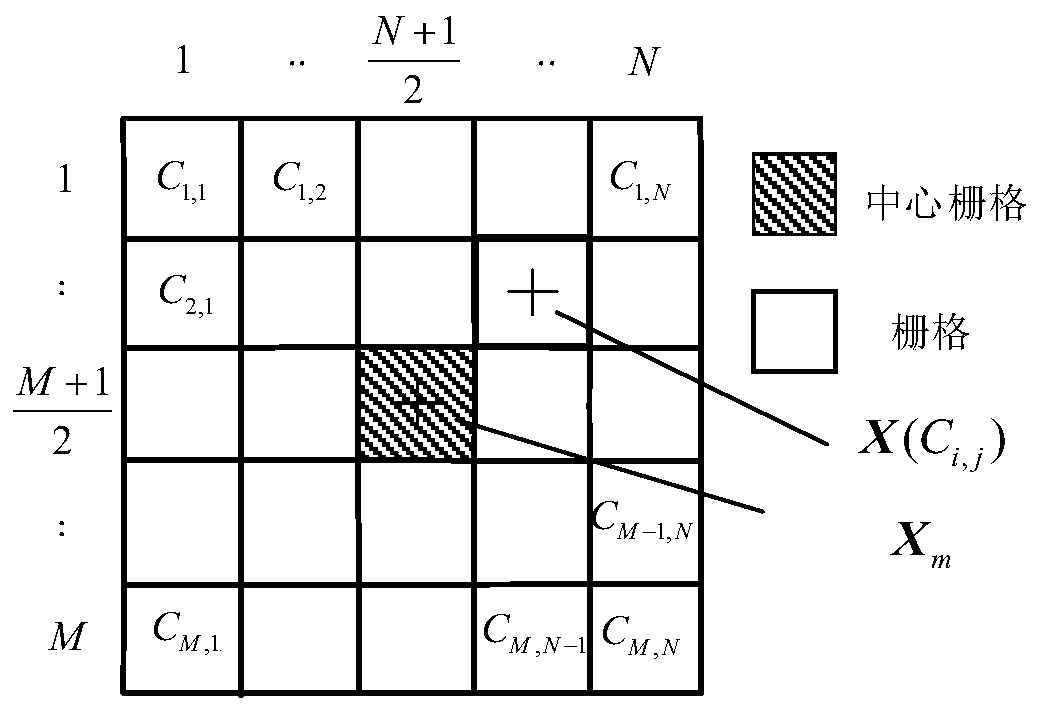
[0045] The RGM records details of the local environment within the current working range of the mobile robot. RGM is a rectangular area composed of grids, and the grid status is constantly updated following the movement of the mobile robot. Grids are the basic elements of RGM.
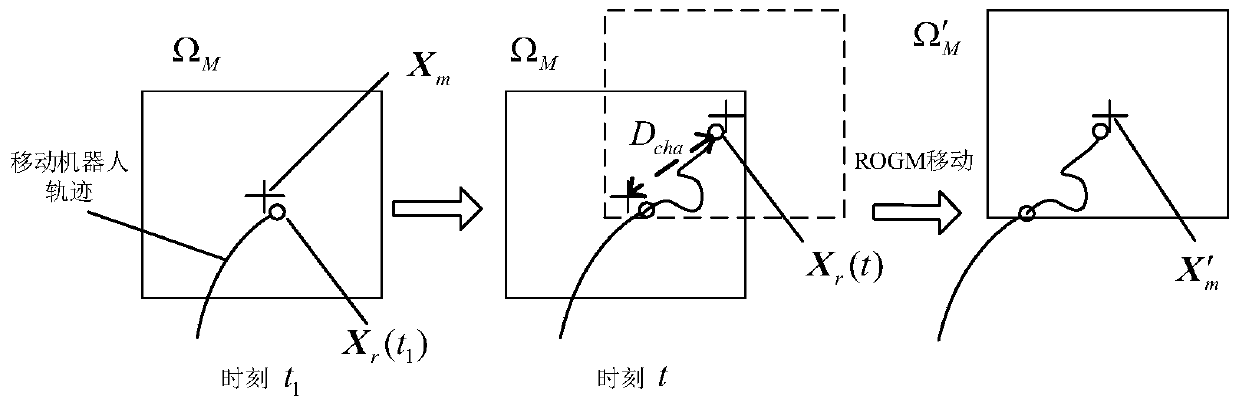
[0046] In this embodiment, the RGM adopts an intermittent movement mode, and the RGM ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More