

Quadruped robot
A quadruped robot, the body technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of inability to expand and contract, easy to overturn, robot easy to overturn, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
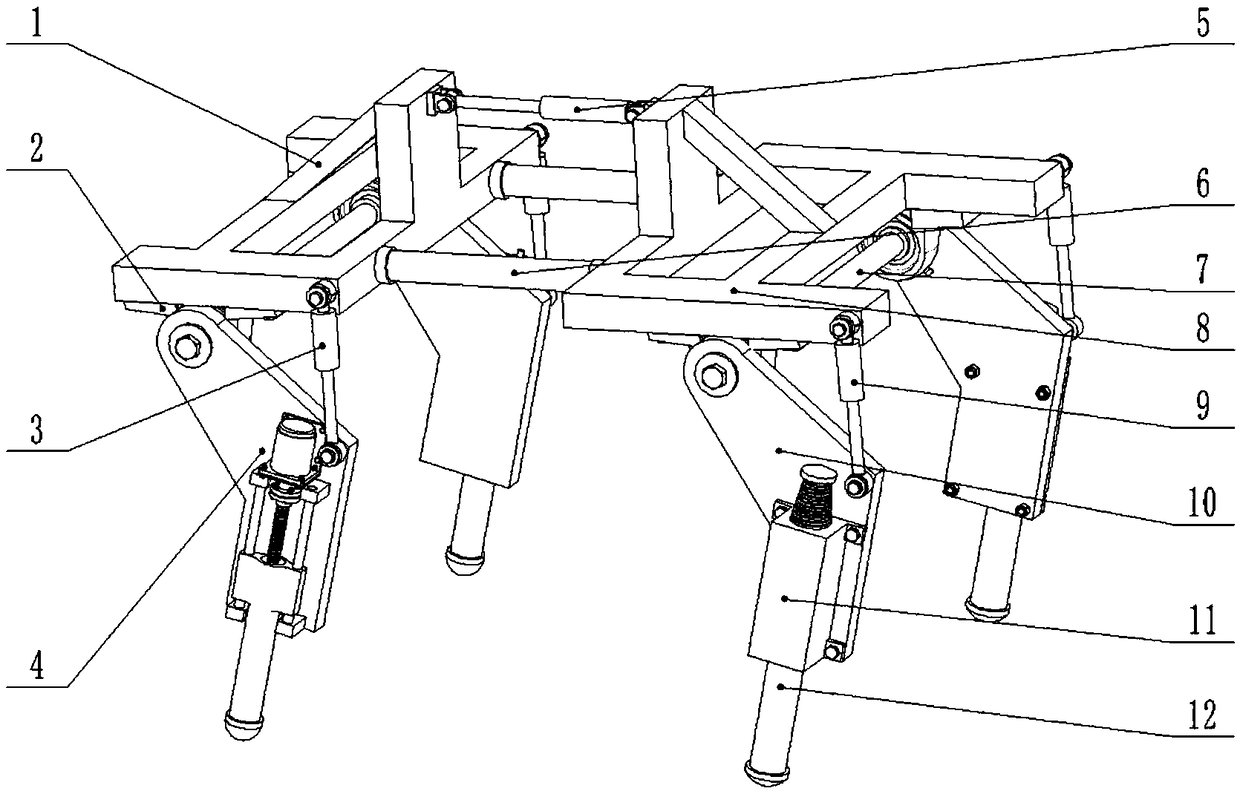
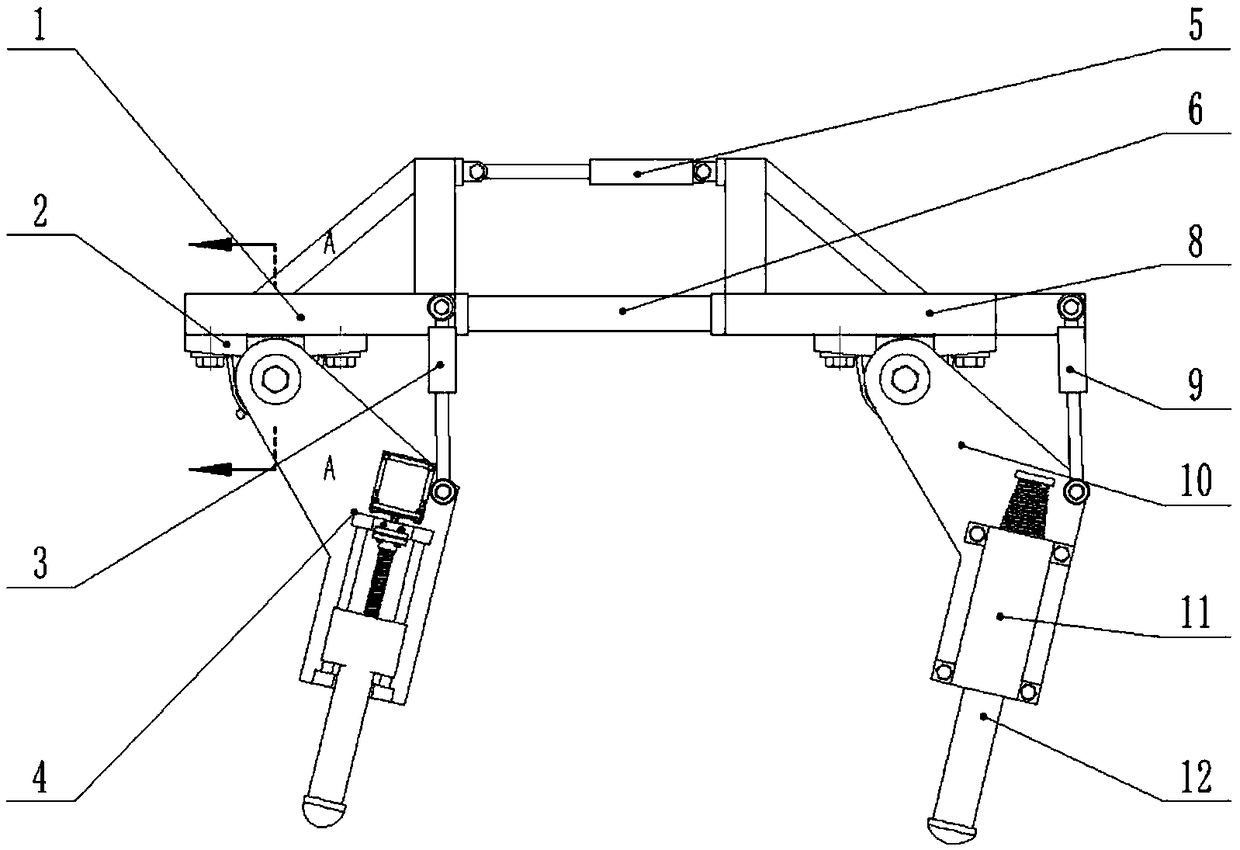
[0029] In a typical implementation of the present application, such as figure 1 As shown, the quadruped robot includes a front body 8 and a rear body 1, the front body 8 and the rear body 1 are connected by an elastic device, and a driving cylinder is also provided between the front body 8 and the rear body 1 5. Realize the relative rotation between the front body 8 and the rear body 1 by inflating and deflating the driving cylinder 5, so as to realize the straightening or bending of the body, so that the body is flexible; when the driving cylinder is deflated, the front body 8 and the rear body 1 is bent, and when the driving cylinder is inflated, the front body 8 and the rear body 1 are straightened.
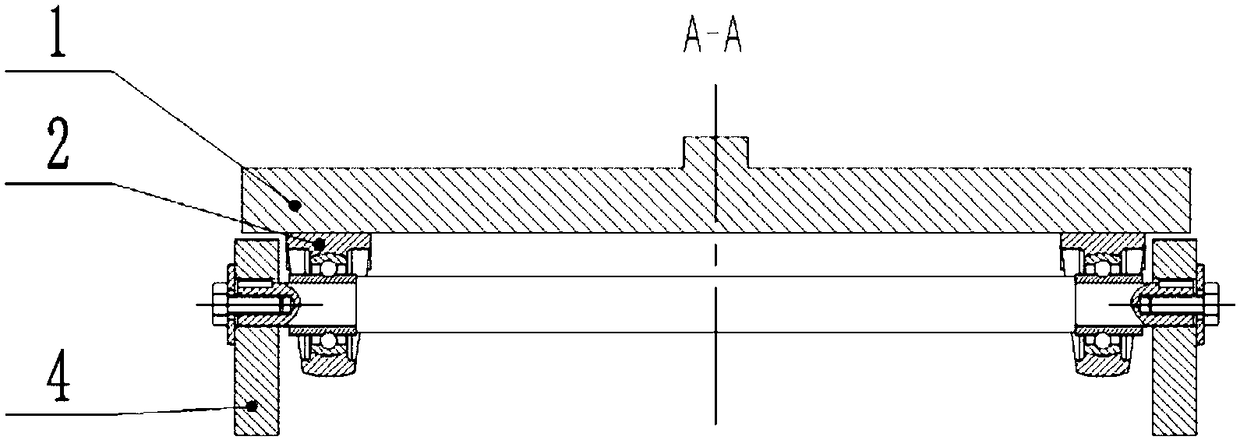
[0030] Two front outriggers are installed on the front body 8, and two rear outriggers are installed on the rear body 1, and the two front outriggers and the two rear outriggers are respectively installed on a rotating shaft to realize the rear outrigger Relative to the swing...
Embodiment 2
[0041] The front outrigger and the rear outrigger in the present embodiment adopt the same driving mode; the described front outrigger and the rear outrigger respectively comprise a thigh and a shank, and an electromagnet is installed on the thigh, and the The lower leg is installed in the electromagnet, and the rear part of the lower leg is connected with the thigh through an elastic device; when the electromagnet is energized, the lower leg stretches out to achieve the effect of extending the length of the leg; when the electromagnet is de-energized , the lower leg is pulled up under the action of the elastic device to achieve the effect of shortening the length of the leg; the rest is the same as in embodiment 1.
Embodiment 3
[0043] The front outrigger and the rear outrigger in this embodiment adopt the same driving mode; the described front outrigger and the rear outrigger respectively include a thigh and a lower leg, and a motor is installed on the thigh, so The motor described above drives a lead screw to rotate through a shaft coupling, and the shank cooperates with the lead screw through threads, the lead screw rotates, and the shank stretches up and down; the rest is the same as that of embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More