

Three-degree-of-freedom turning frame system applied to dynamic flight simulator of helicopter
A dynamic flight and simulator technology, which is applied to the simulation devices, simulators, instruments and other directions of space navigation conditions, can solve the problems of difficult positioning of the shaft connection coaxial, limited motor driving torque, and difficult disassembly and assembly of the rotating frame system, etc. Achieve the effect of increasing structural integrity and reliability, increasing structural strength and rigidity, and reducing mass and moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
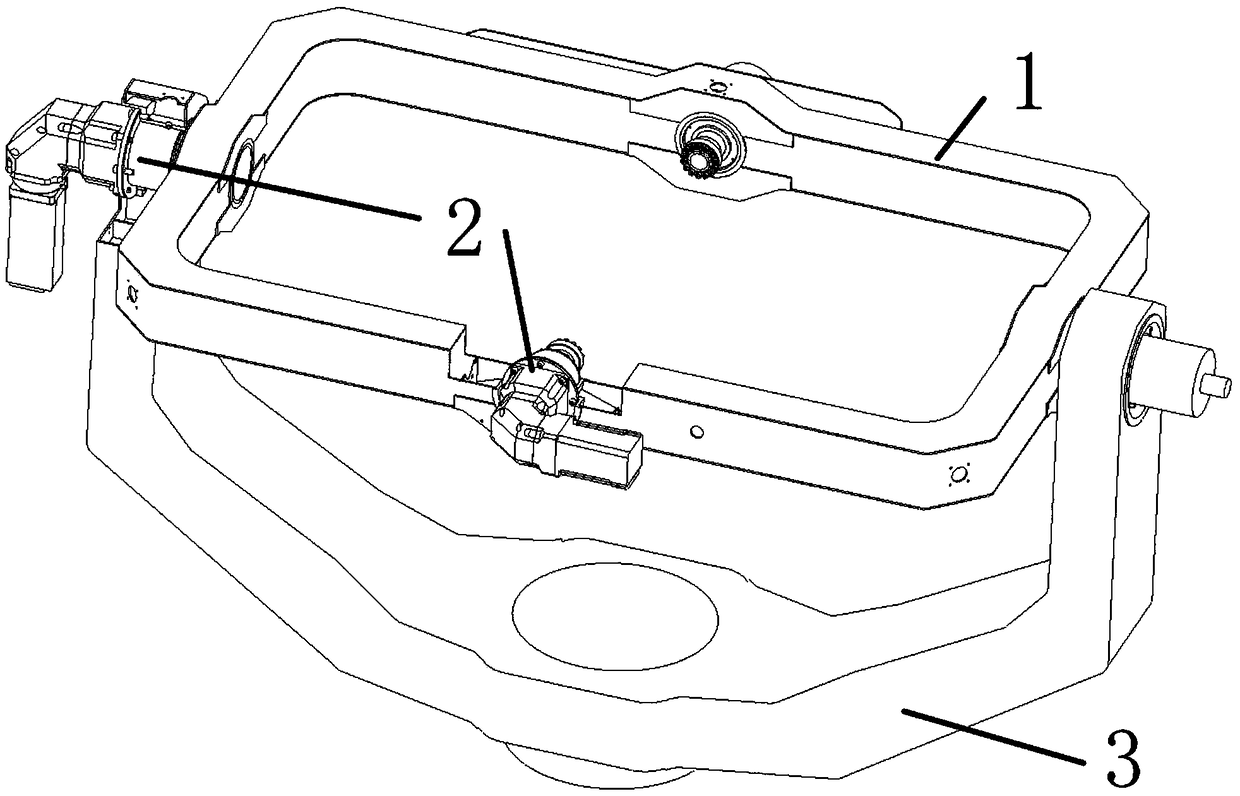
[0055] Example 1, such as figure 1 Shown:
[0056] Three degrees of freedom rotating frame system for helicopter dynamic flight simulator, including:
[0057] Rolling frame 1; the manned cockpit (not shown) is rotatably mounted on the rolling frame 1;
[0058] The yaw frame 3; the roll frame 1 is rotatably mounted on the yaw frame 3, and the yaw frame 3 is rotatably mounted on the arm of the centrifuge platform; the rotation plane of the manned cockpit is perpendicular to the rotation plane of the roll frame 1, The rotation plane of the yaw frame 3 is perpendicular to the rotation plane of the manned cockpit and the rotation plane of the roll frame 1 respectively.
[0059] The roll frame 1 is rotatably connected to the manned cockpit to realize the pitching motion of the manned cockpit, the yaw frame 3 is rotatably connected to the roll frame 1 to realize the roll motion of the manned cockpit, and the yaw frame 3 is connected to the end of the rotating arm of the centrifuge T...
Embodiment 2
[0060] Example 2, such as figure 1 with figure 2 Shown:
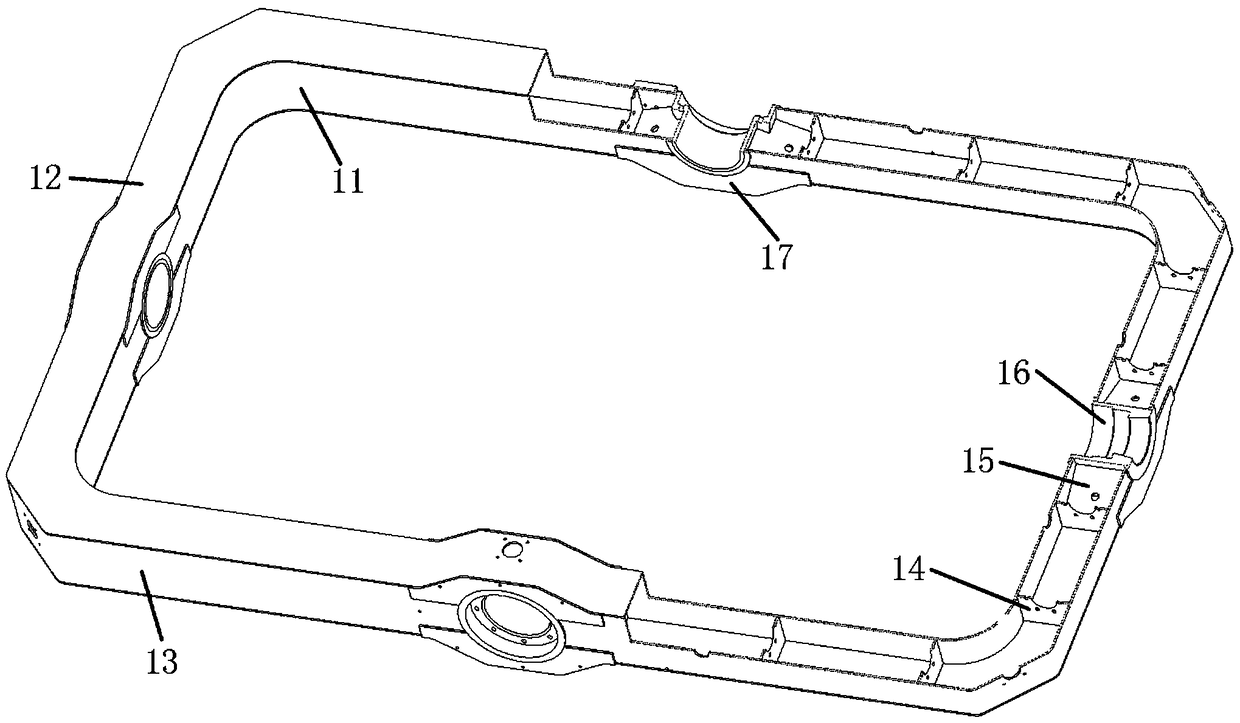
[0061] The difference between this embodiment and Embodiment 1 is that the rolling frame 1 is a rectangular frame structure, and the rolling frame 1 includes:
[0062] Rectangular inner ring plate 11;
[0063] A rectangular outer ring plate 13; the outer ring plate 13 is installed outside the inner ring plate 11;
[0064] Two cover plates 12; the two cover plates 12 are respectively arranged on the upper and lower parts after the combination of the inner ring plate 11 and the outer ring plate 13, and surround a rectangular hollow structure, and each side of the rectangular hollow structure is provided with a shaft hole 16 , the two shaft holes 16 on the opposite sides are coaxial. The shaft hole 16 on each side of the rectangular hollow structure is located at the center of each side. Preferably, on the rolling frame 1, at the position where the shaft hole 16 is provided, the inner ring plate 11 and the outer ring...
Embodiment 3
[0066] Example 3, such as figure 2 Shown:
[0067] The difference between this embodiment and embodiment 2 is that the rolling frame 1 also includes:
[0068] A plurality of ribs 14; the plurality of ribs 14 are vertically installed inside the rectangular hollow structure at even intervals, and the four sides of each rib 14 are respectively fixedly connected to the inner ring plate 11, the outer ring plate 13 and the two cover plates 12;
[0069] A plurality of ribs 15; the ribs 15 are installed inside the rectangular hollow structure on both sides of the shaft hole 16, and the four sides of the ribs 15 are respectively fixedly connected to the inner ring plate 11, the outer ring plate 13, a rib 14 and the wall of the shaft hole 16.
[0070] The design of the ribs 14 and the ribs 15 only increases the structural strength and rigidity of the roll frame 1 with a small weight, and at the same time increases the structural integrity and reliability. The design of the rib plate ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More