

Multifunctional robotic gripper
An industrial robot and hand grasping technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of small grasping load, impact on work efficiency, and low positioning accuracy, so as to improve production efficiency, improve flexibility, and improve The effect of finger stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] An industrial robot end effector of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
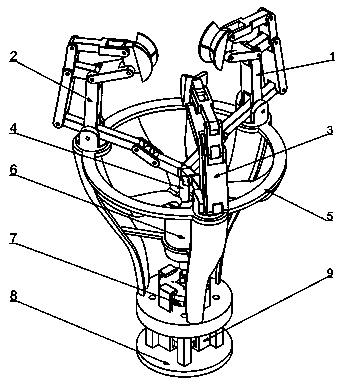
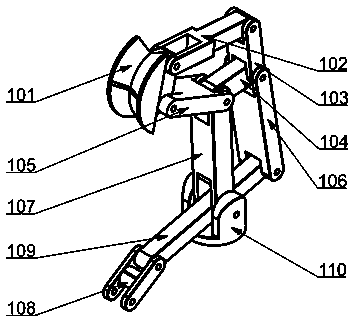
[0037] The invention relates to an end effector of an industrial robot, which adopts the design of a three-grab self-centering structure, and three hand grippers interact to form an end operation part. The connection between the hand clamp and the chassis is fixed by bolts. Whether the end effector can accurately clamp the product and deliver the product to the designated position depends not only on the positioning accuracy of the end effector, but also on the magnitude of the clamping error and the installation positioning accuracy. With the structural device of the present invention, according to the shape and size of the product and the requirements of the material, hardness and surface properties of the clamping part, the fingertip part is designed with a half-moon-shaped V-shaped groove surface and made of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More