

Lane line recognition method based on vehicle lidar
A vehicle-mounted lidar, lane line recognition technology, applied in character and pattern recognition, radio wave measurement system, radio wave reflection/re-radiation, etc. Wide-ranging, high-resolution effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing, the present invention will be further described:
[0043] The lane line recognition method based on vehicle lidar, the steps are as follows:
[0044] 1. Read the road point cloud data in the middle of curb (curb is the curb):
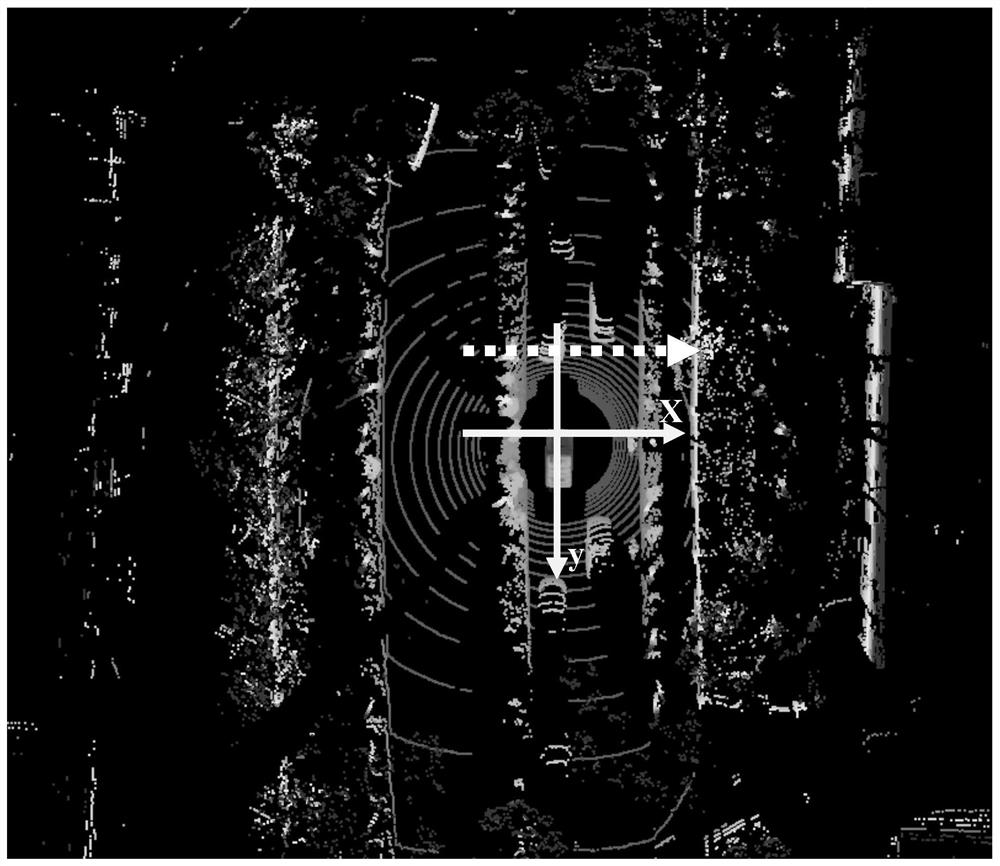
[0045] In this embodiment, a 32-line laser radar sensor is used, and the sensor is installed vertically on the roof of the vehicle to obtain the environmental point cloud data of the road and its surroundings;
[0046] (1) First, in order to limit the road analysis area, use the least squares algorithm to fit the functional relationship y of the left and right curb respectively l =a l x l +b l and y r =a r x r +b r , where y l Represents the ordinate value of the curb point cloud on the left, x l Represents the abscissa value of the curb point cloud on the left, a l is the coefficient of the curb function on the left, b l is the intercept of curb function on the left, y r Represents the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More