

Robot joint structure
A technology of robot joints and joints, applied in the field of robots, can solve problems such as the difficulty of robot joint design, and achieve the effects of reducing design difficulty, simple installation and low design cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
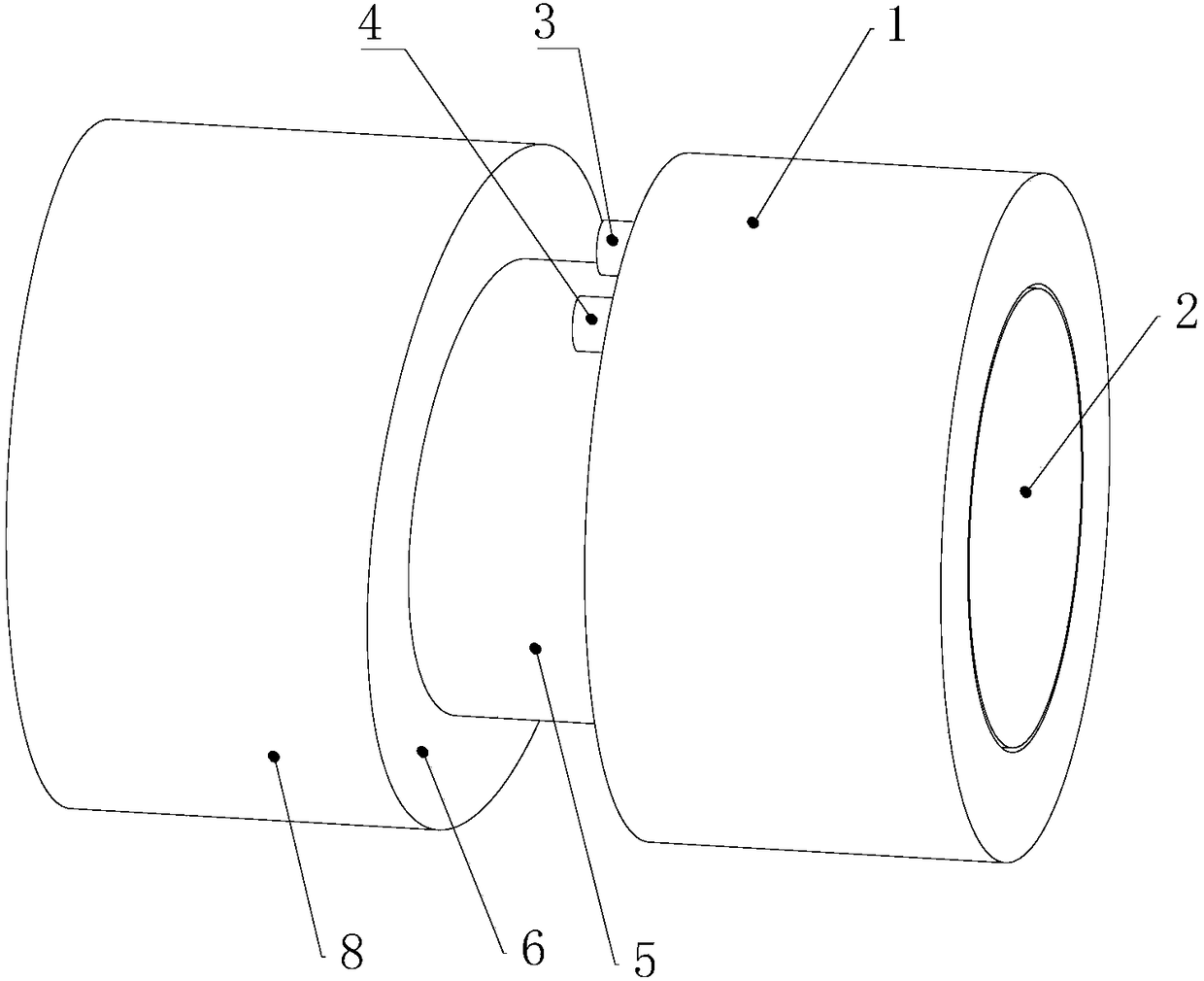
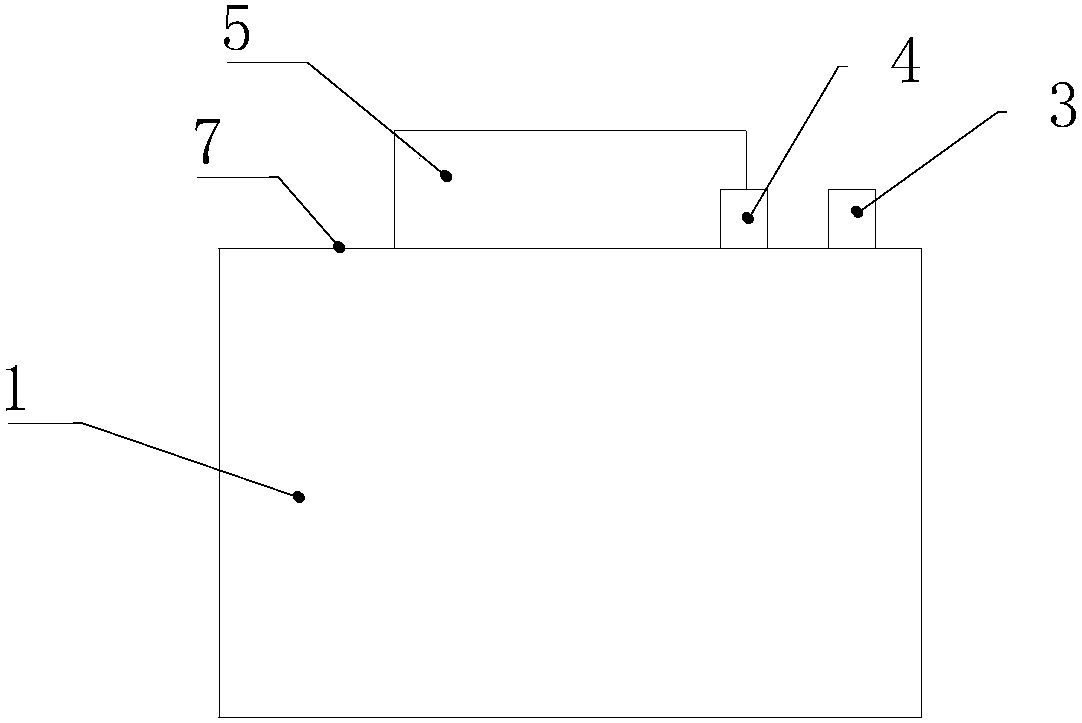
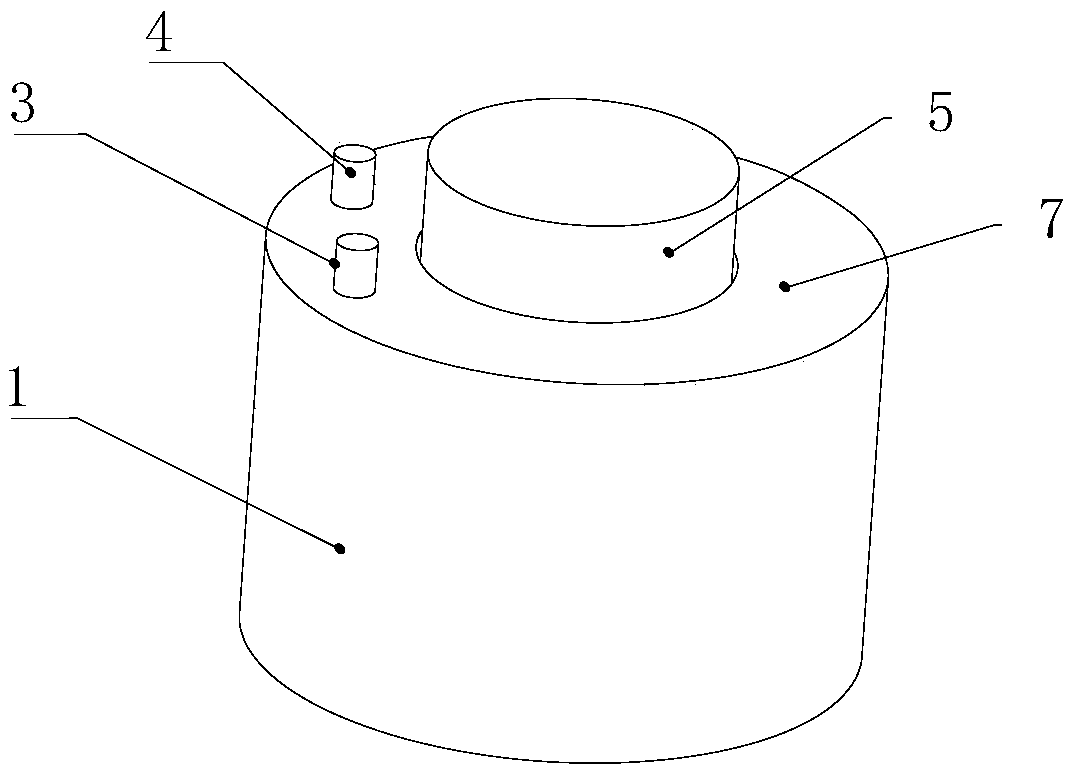
[0024] The core idea of the present invention is to use the characteristics of the joint itself to calculate the rotation angle of the joint, so that the measurement of the joint rotation angle can be completed without installing encoders and other equipment at the joint, thereby simplifying the structural design of the robot and reducing the cost. Specifically, the distance between the two adjacent surfaces of the two joints is measured by using the distance measuring sensor. The distance changes periodically, and the rotation angle of the joint is calculated according to the change rule, which is simple and convenient.
[0025] The robot joint structure proposed by the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. The advantages and features of the invention will be apparent from the claims and the following description. It should be noted that all the drawings are in a very simplified fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More