

Image processing method for centimeter-level precise landing of UAV (unmanned aerial vehicle)
An image processing and unmanned aerial vehicle technology, applied in the direction of finding the target control, etc., can solve the problems of limited recognition height, insufficient adaptability, blurred details of the two-dimensional code, etc., to achieve the effect of accurate recognition and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below by means of the accompanying drawings.
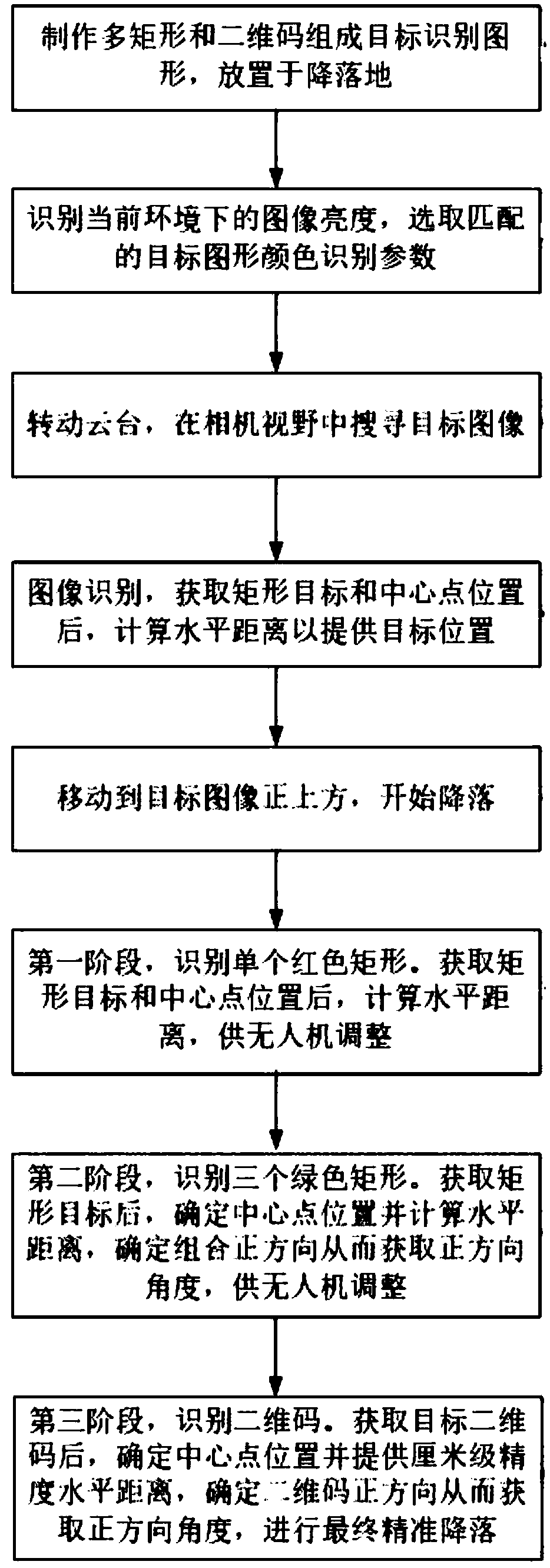
[0028] Such as figure 1 As shown, it is the process flow of the image processing method for centimeter-level precise landing of the UAV in the present invention.
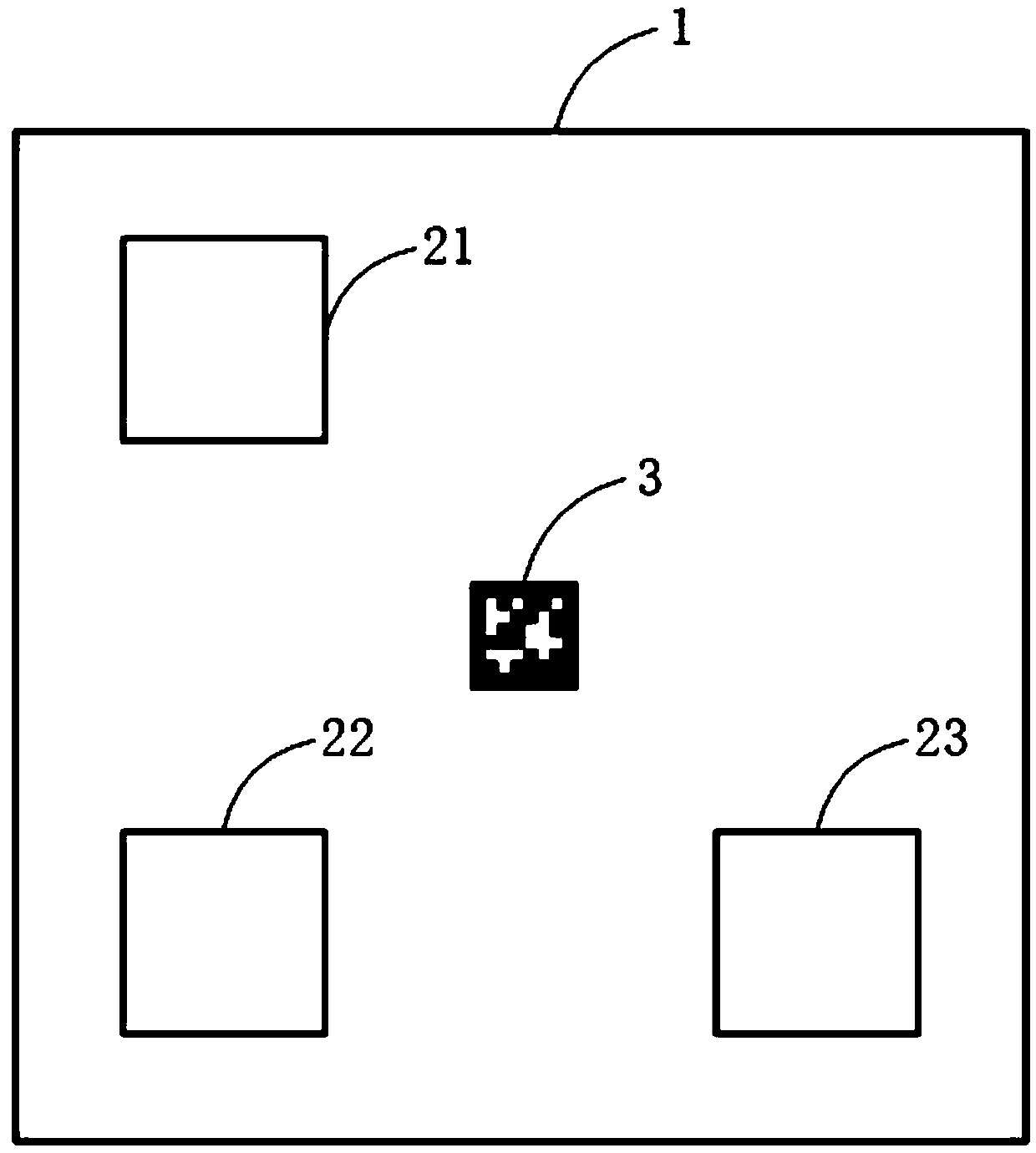
[0029] Such as figure 2 As shown, there are four rectangles, which are respectively a large rectangle 1, a first small rectangle 21, a second small rectangle 22, a third small rectangle 23, and a two-dimensional code 3. The target recognition graphics are a large large rectangle and three small rectangles and a single two-dimensional code, the center of the large rectangle, the center of the three small rectangles, and the center of the two-dimensional code coincide; the colors of the large rectangle and the small rectangle are different. In the present invention, the large rectangle is red, and the three small rectangles are green. The colors of the red rectangle and the green rectangle are not unique, as lon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More