

Lane line detection method
A lane line detection and lane line technology, applied in the field of lane line detection, can solve the problems of large amount of calculation, insufficient stability, low stability of lane lines, etc., to achieve high-speed detection and reduce interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
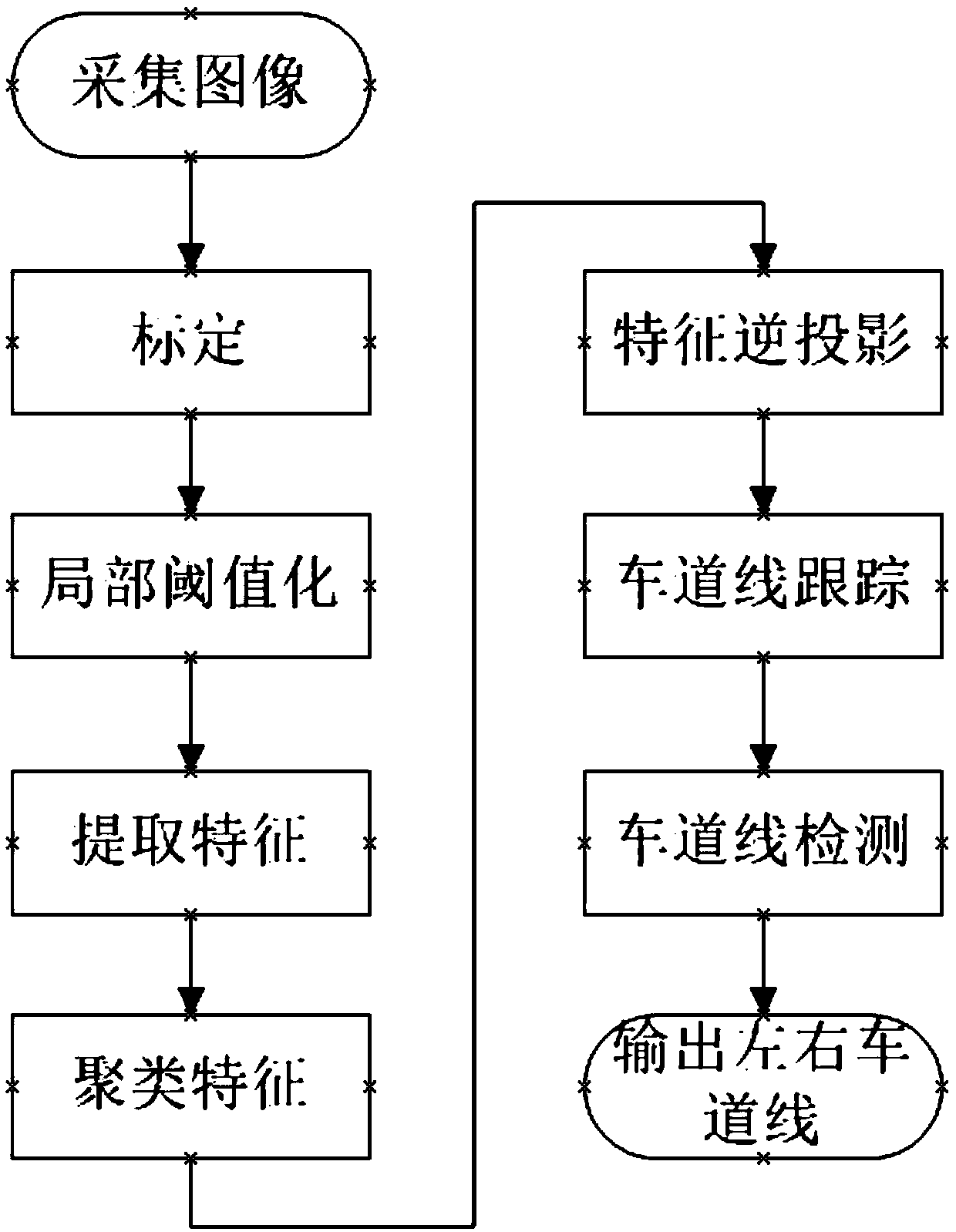
[0037] Such as figure 1 As shown, the present invention provides a lane line detection method, the method includes detection and tracking two parts, the specific steps are as follows:
[0038] Step 1, collecting images in real time;
[0039] Step 2. Calibrate the collected images, and then obtain the homography matrix of the image coordinate system and the world coordinate system. Through the homography matrix, the image coordinate system and the world coordinate system can be associated, and the coordinate system can be realized. convert each other.
[0040] Step 3: Convert the collected image into a grayscale image, and calculate the grayscale threshold of the lane line by using the local grayscale threshold method. Since the gray value of the lane line is significantly higher than that of the road surface, the approximate area containing the lan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More