

Grabbing mechanism used for sectional material traction and grabbing method thereof
A profile and grasping technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of reducing the versatility and practicability of traction equipment, increasing the production and processing costs of enterprises, and achieving strong practicability, improving balance stability, Universal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
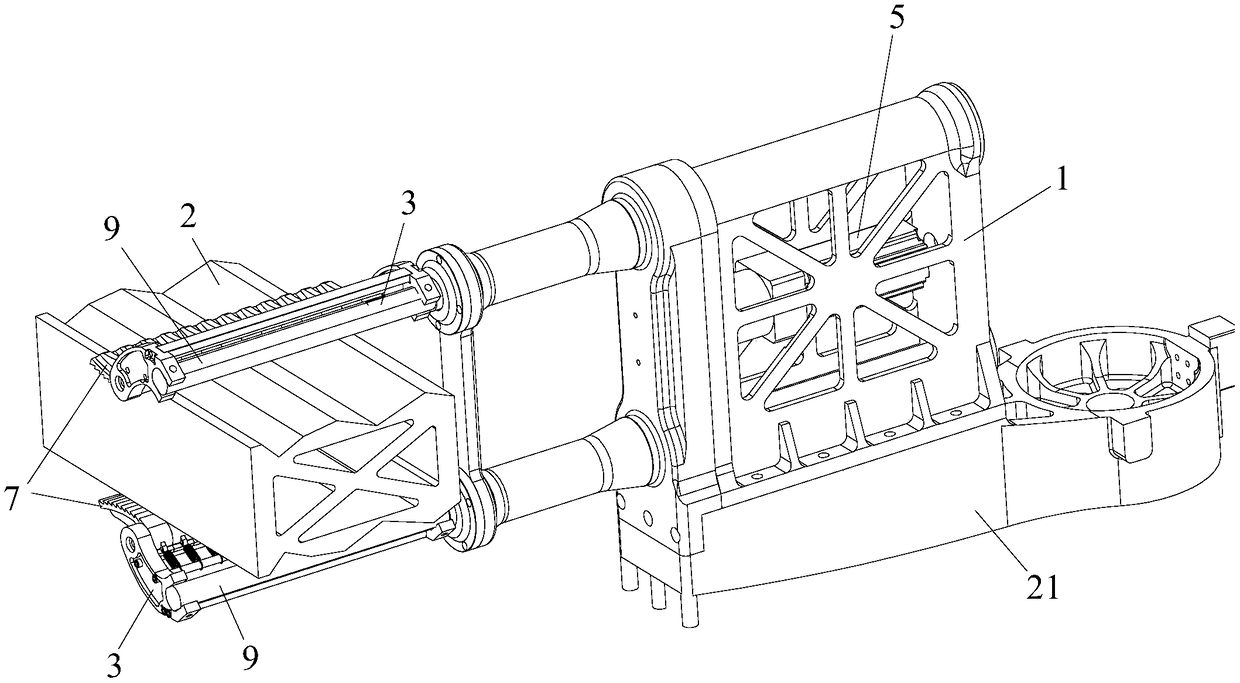
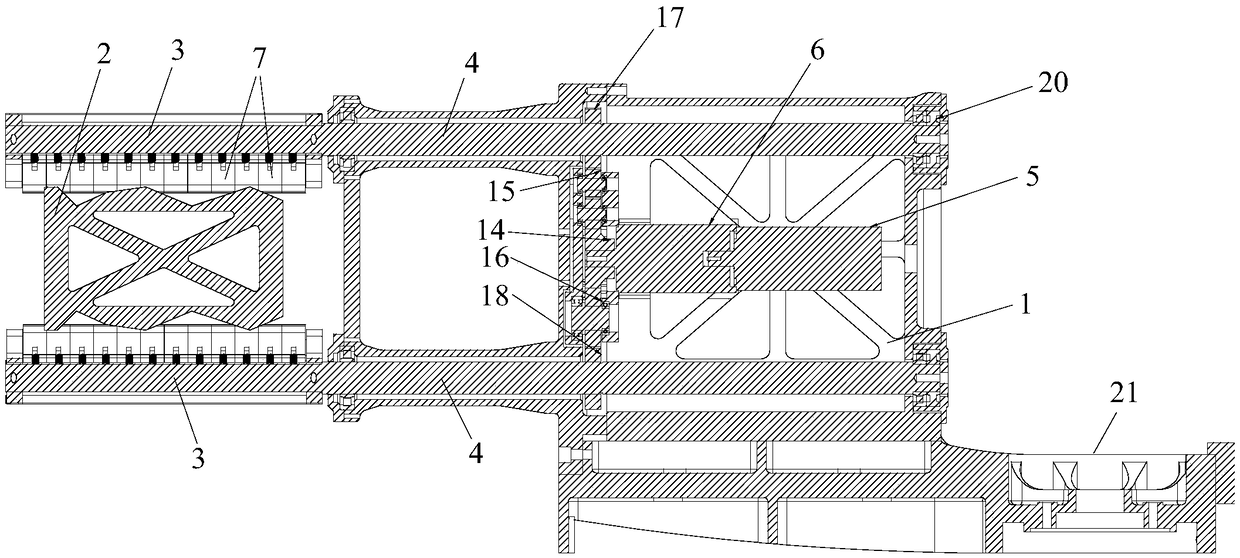
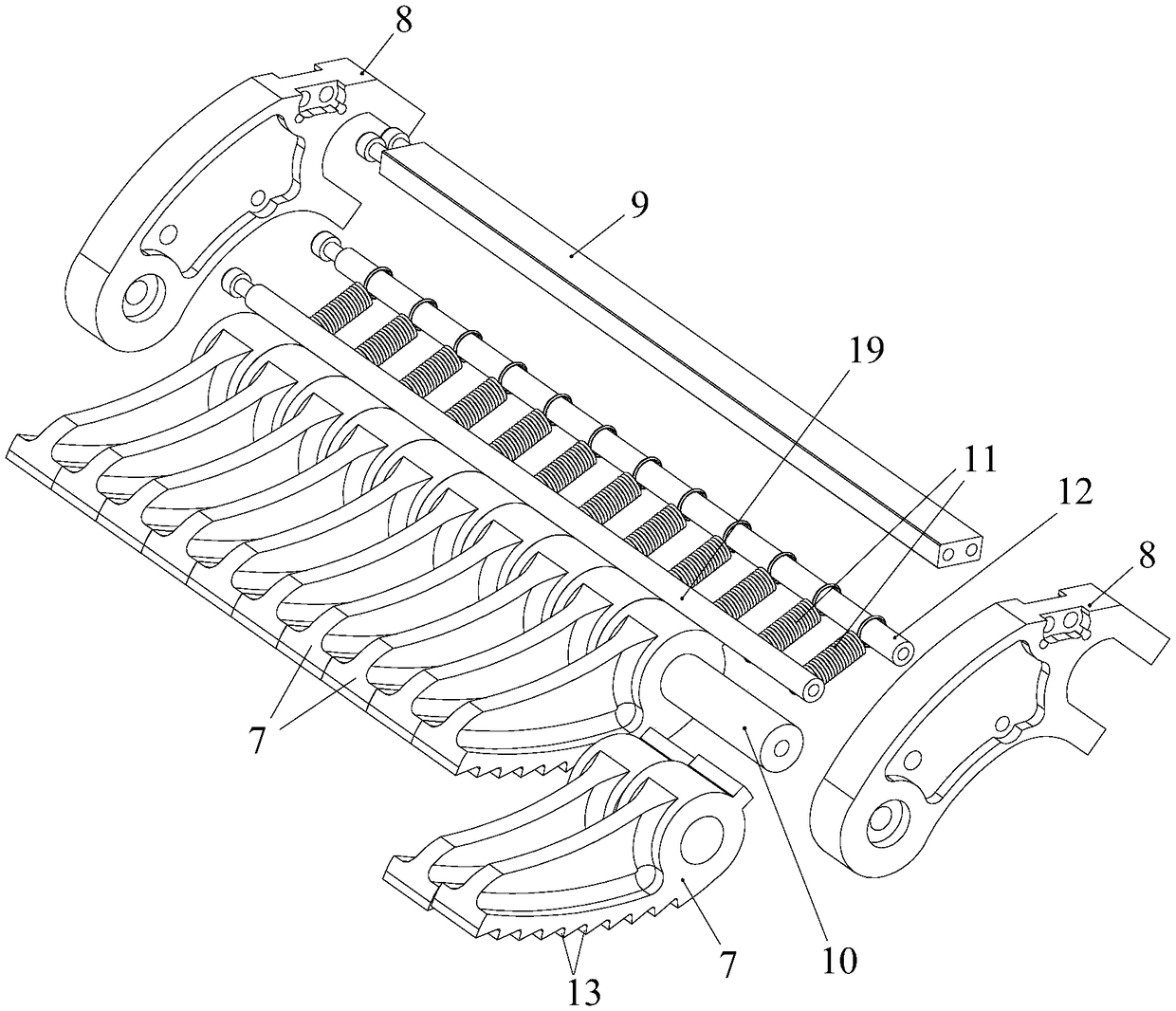
[0029] like Figure 1 to Figure 4 As shown, a gripping mechanism for profile traction of the present invention includes an arm 21, a power box 1 connected to the arm 21, a drive component and a transmission module arranged in the power box 1, and the profile 2 is grasped respectively. Two gripper modules 3 and two rotating shafts 4 pierced in the power box 1, wherein the driving part is connected by a torque motor 5 and a reducer 6; the transmission module is connected to the The two gripper modules 3 are connected, and the two gripper modules 3 are set up and down oppositely in a mirror-symmetrical manner. The driving part is connected with the transmission module. When working, the driving part drives the two rotating shafts 4 to rotate in reverse through the transmission module to drive the two mirror-symmetric gripper modules 3 to rotate outwards in reverse to realize the unloading of the profile 2, or The grasping of the profile 2 is achieved by driving the two mirror-sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More