

Chassis control system for picking robot
A picking robot and control system technology is applied in the field of picking robot chassis control system to achieve the effects of strong practicability, high precision and quick response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Below in conjunction with accompanying drawing, the present invention will be further described:
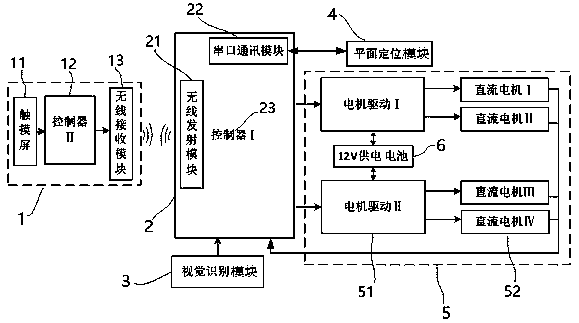
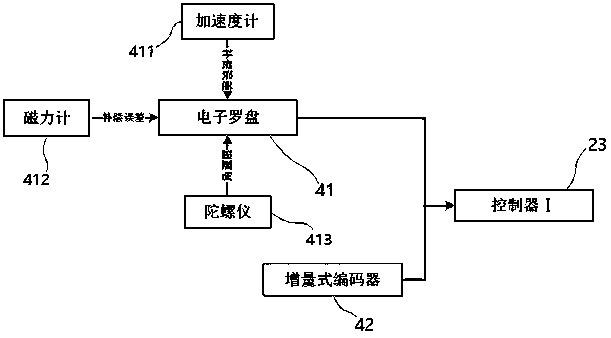
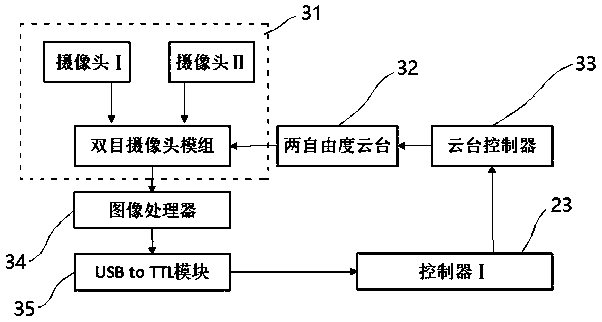
[0034] Figure 1 to Figure 3 A specific implementation of the picking robot chassis control system of the present invention is shown. figure 1 It is a structural schematic diagram of the chassis control system of the picking robot in the present embodiment; figure 2 It is a schematic structural diagram of the plane positioning module in this embodiment; image 3 It is a schematic structural diagram of the visual recognition module in this embodiment.
[0035] Such as figure 1 As shown, the picking robot chassis control system in this embodiment includes a main control module 2, a plane positioning module 4, a visual recognition module 3, a chassis walking module 5 and a power supply module 6, a plane positioning module 4, a visual recognition module 3 and a chassis The walking module 5 is connected with the main control module 2 respectively;
[0036] The visual reco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More