

Single-drive bionic multi-legged robot and reconfiguration steering method thereof
A multi-legged robot and single-drive technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of complex control, difficulty in realizing the rapid and efficient movement of the robot, and increasing the quality of the robot, so as to improve the moving efficiency, simple structure, and control easy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
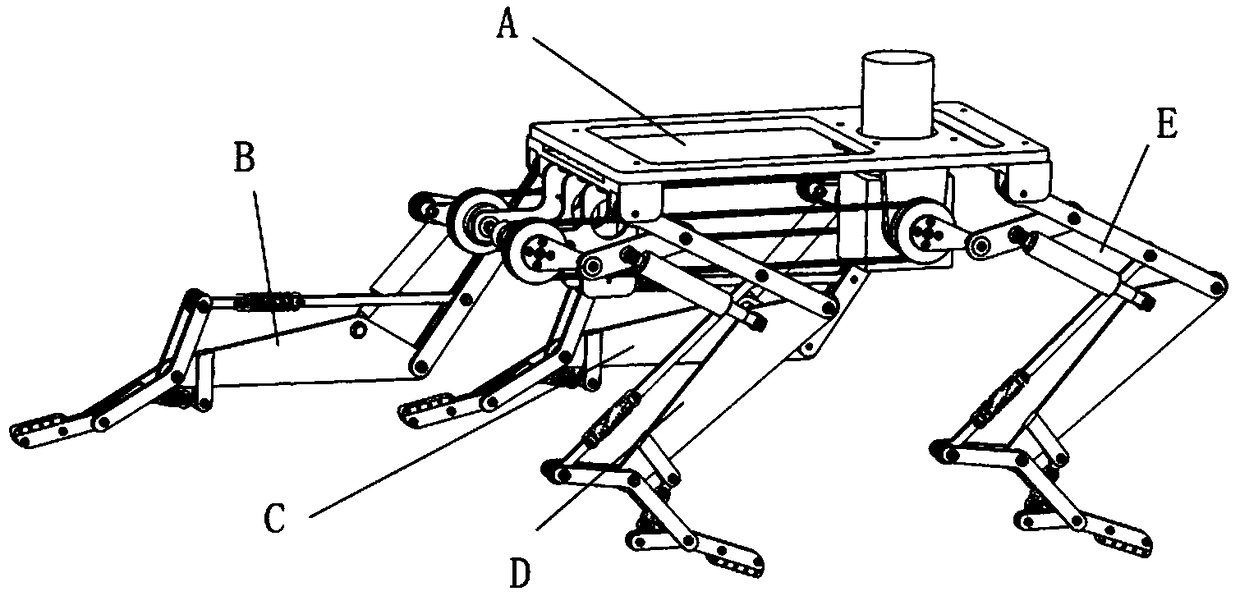
[0022] Such as figure 1 As shown, a single-drive bionic multi-legged robot consists of frame A, left rear leg B, left front leg C, right rear leg D and right front leg E.
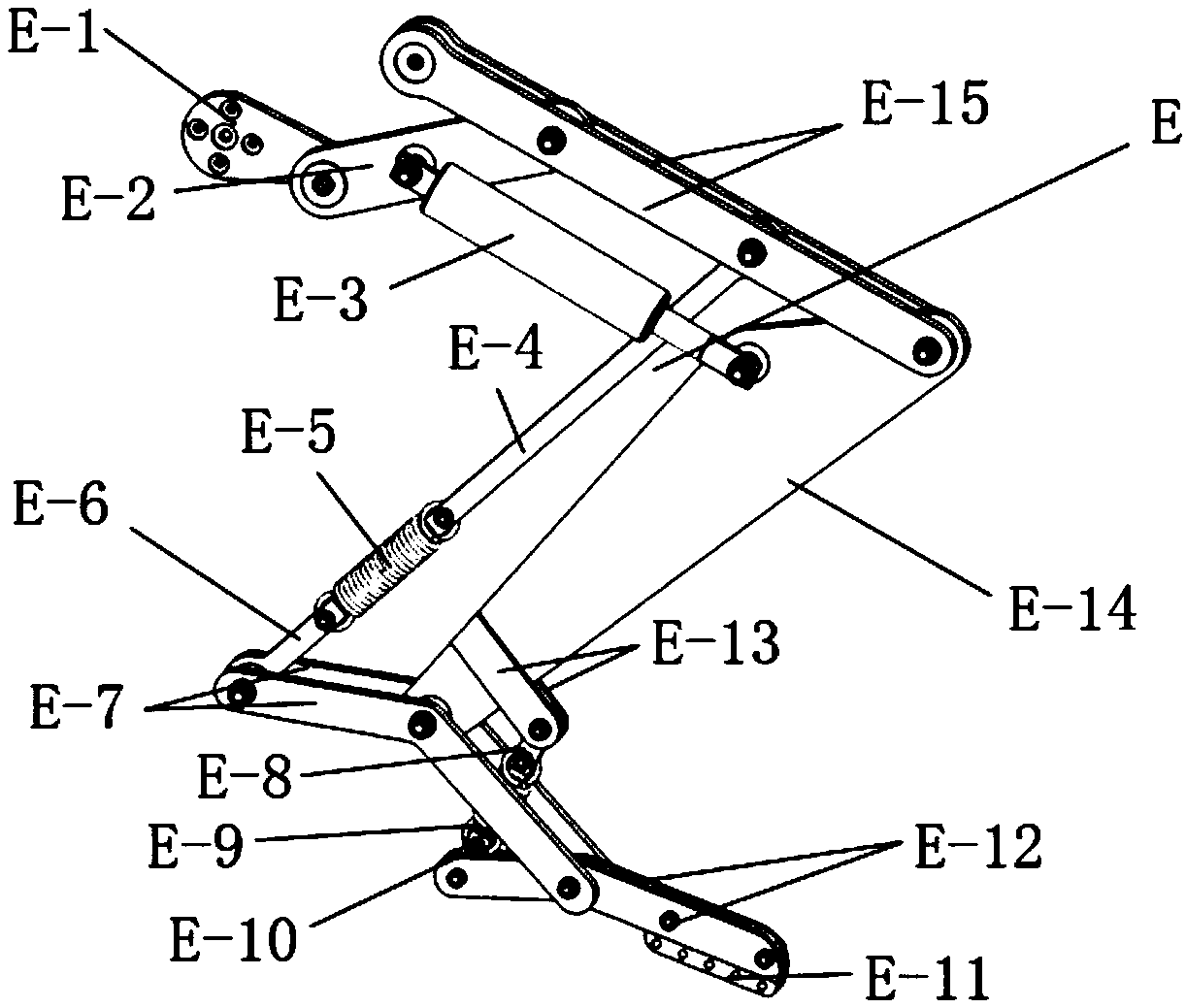
[0023] The mechanical structure of the right front leg E, the left rear leg B, the left front leg C, and the right rear leg D, the shape of the bar and the assembly method are exactly the same.
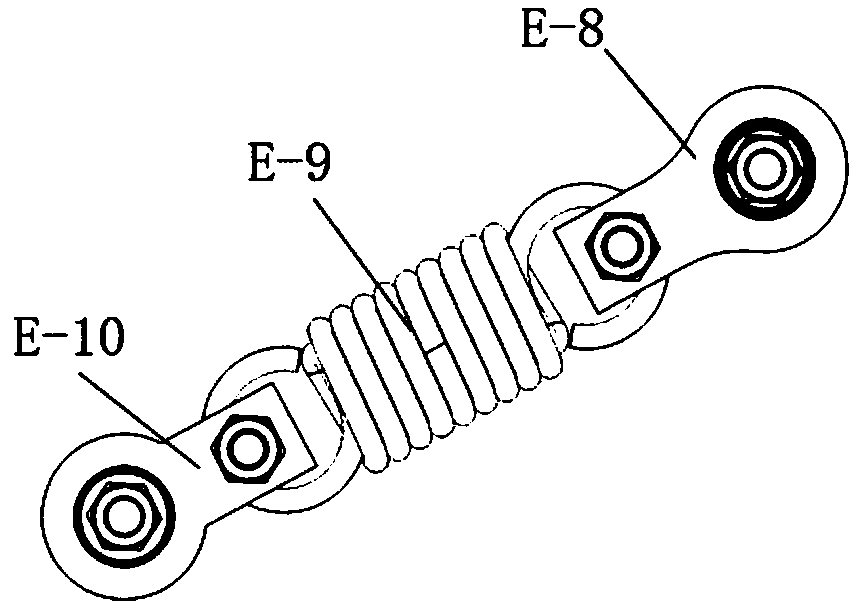
[0024] Such as figure 2 As shown, the right front leg E includes: crank E-1, connecting rod E-2, biceps brachii connecting rod E-3, upper gastrocnemius connecting rod E-4, Achilles tendon E-5, gastrocnemius Lower connecting rod E-6, metatarsal bone E-7, quadratus plantar connecting rod upper E-8, quadratus plantar muscle E-9, lower quadratus plantar connecting rod E-10, rubber pad E-11, phalanges E -12, splint E-13, calf bone E-14 and femur bone E-15.
[0025] The connection method in the rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More