

Kalman filter navigation method based on magnetic declination and magnetic inclination
A technology of Kalman filtering and navigation method, which is applied to the Kalman filtering navigation of magnetic inclination angle. Based on the field of magnetic declination, it can solve the problems of low navigation accuracy and poor portability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
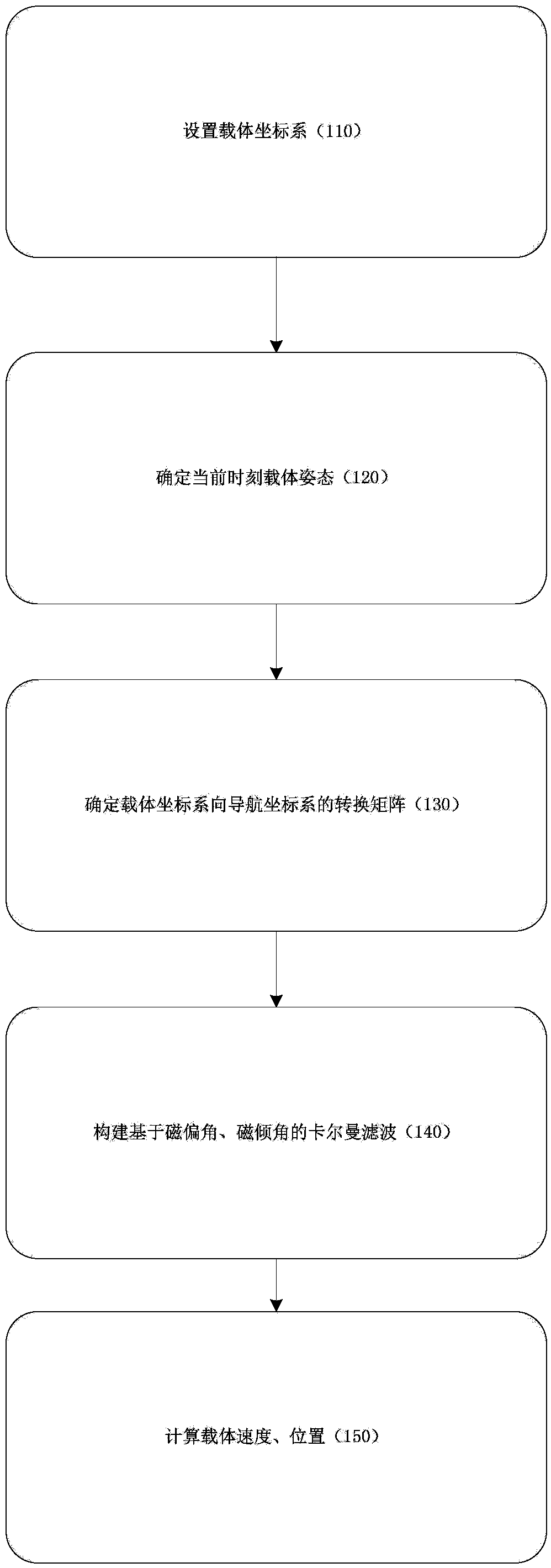
[0045] Embodiment 1 of the present invention can be specifically applied to products that require high-precision navigation, such as drone positioning, automatic driving, digital city, robot navigation, etc. figure 1 It is a flow chart of a Kalman filter navigation method based on magnetic declination and magnetic inclination provided by Embodiment 1 of the present invention. The method of this embodiment specifically includes:
[0046]110. Set a carrier coordinate system, where the three axes of the carrier coordinate system are denoted as xyz.
[0047] In the example in this city, the carrier coordinate system is fixedly connected with the carrier, and the coordinate system conforms to the right-hand rule. Determined by the right-hand rule.
[0048] 120. Determine the attitude of the carrier at the current moment through the inertial sensor, which is recorded as att=[φ θ ψ], where φ represents the roll angle, θ represents the pitch angle, and ψ represents the heading angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More