A path-following control method for a full-wire control electric vehicle
A technology for electric vehicles and path tracking, which is applied in the direction of electric vehicles, control drives, control devices, etc., can solve the problem that the fixed prediction domain model predictive control method cannot be self-adaptive to meet the needs of vehicle tracking accuracy and stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
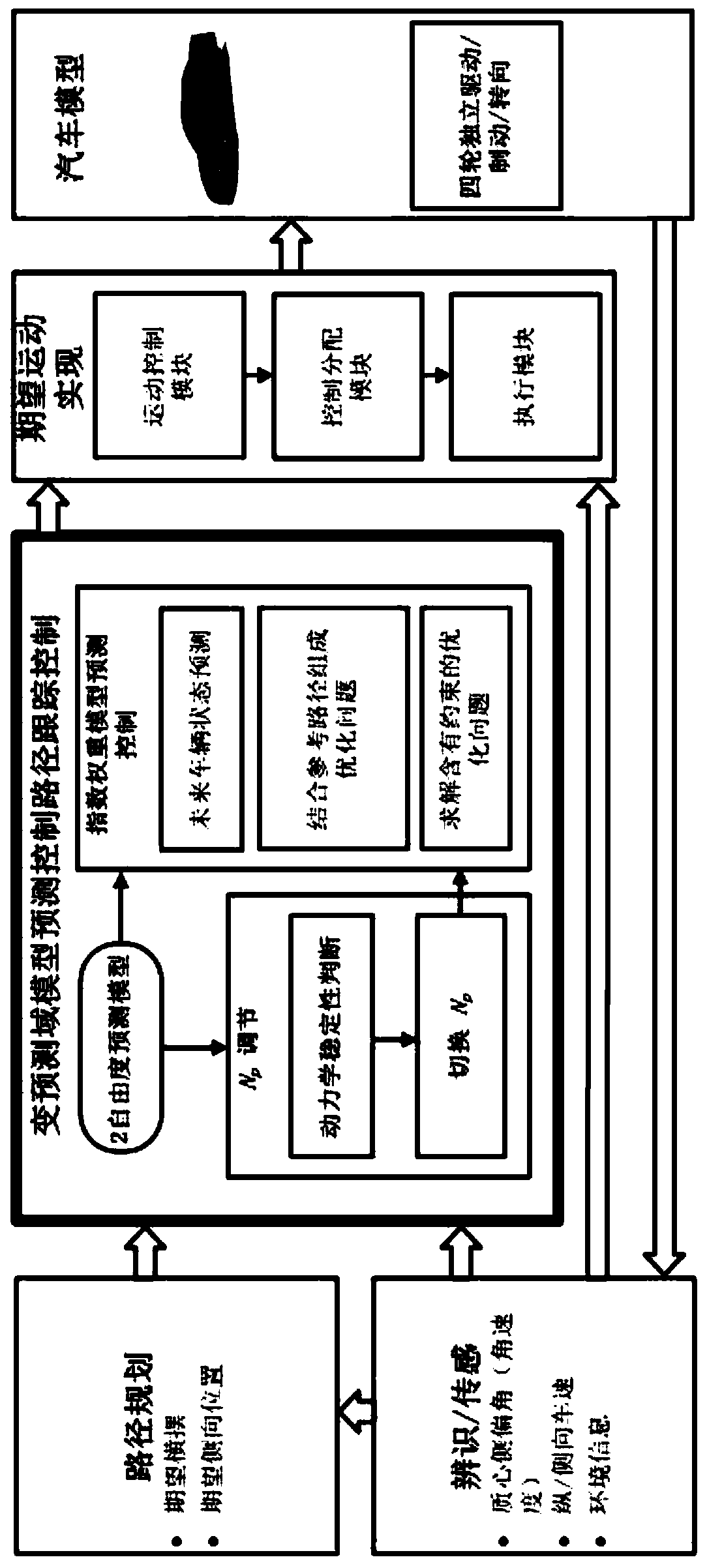
[0090] Such as figure 1 As shown, the present invention provides a full-wire control electric vehicle path tracking control method, which specifically includes the following steps:
[0091] Step 1. The expected value of the tracking reference path is given, including the expected yaw angle ψ, the expected lateral displacement Y, and the expected vehicle speed V xd ;
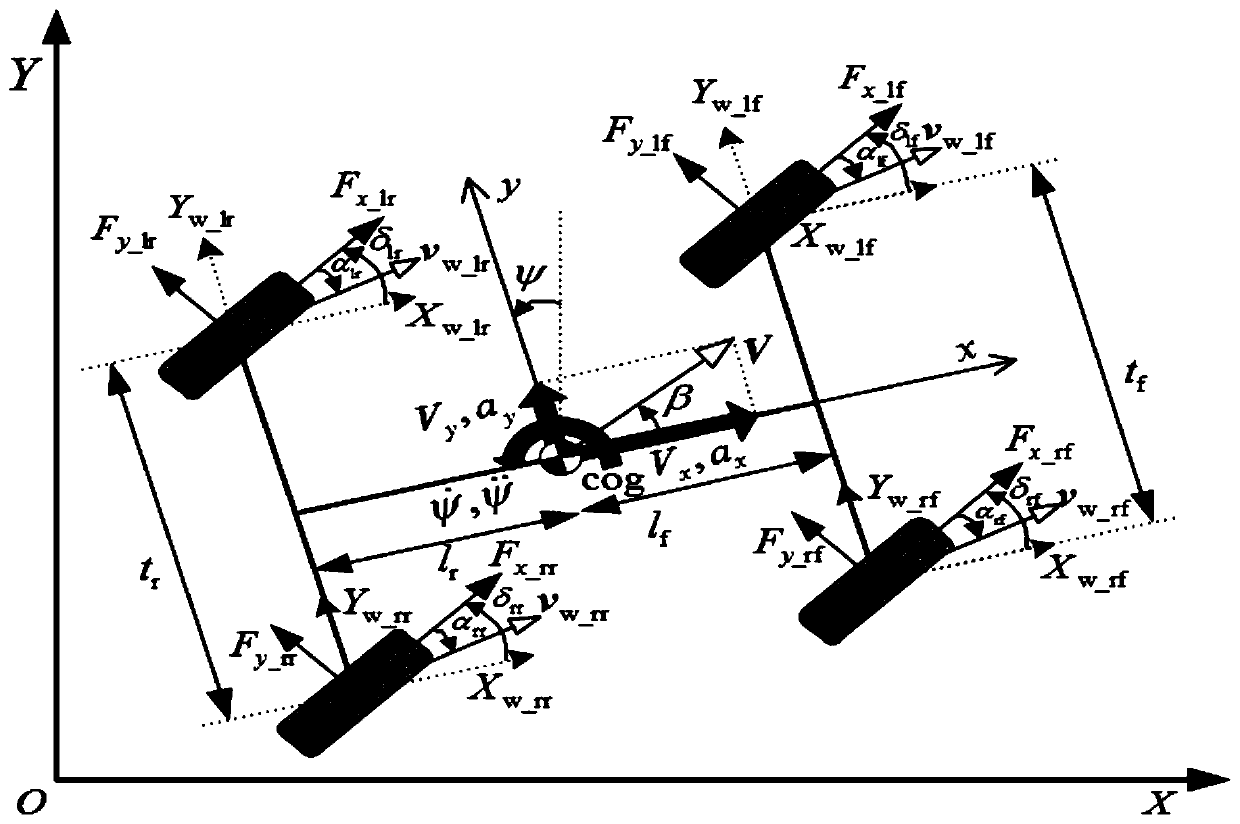
[0092] Step 2. Establishing a vehicle state prediction model and a dynamics model of a full-wire control electric vehicle;
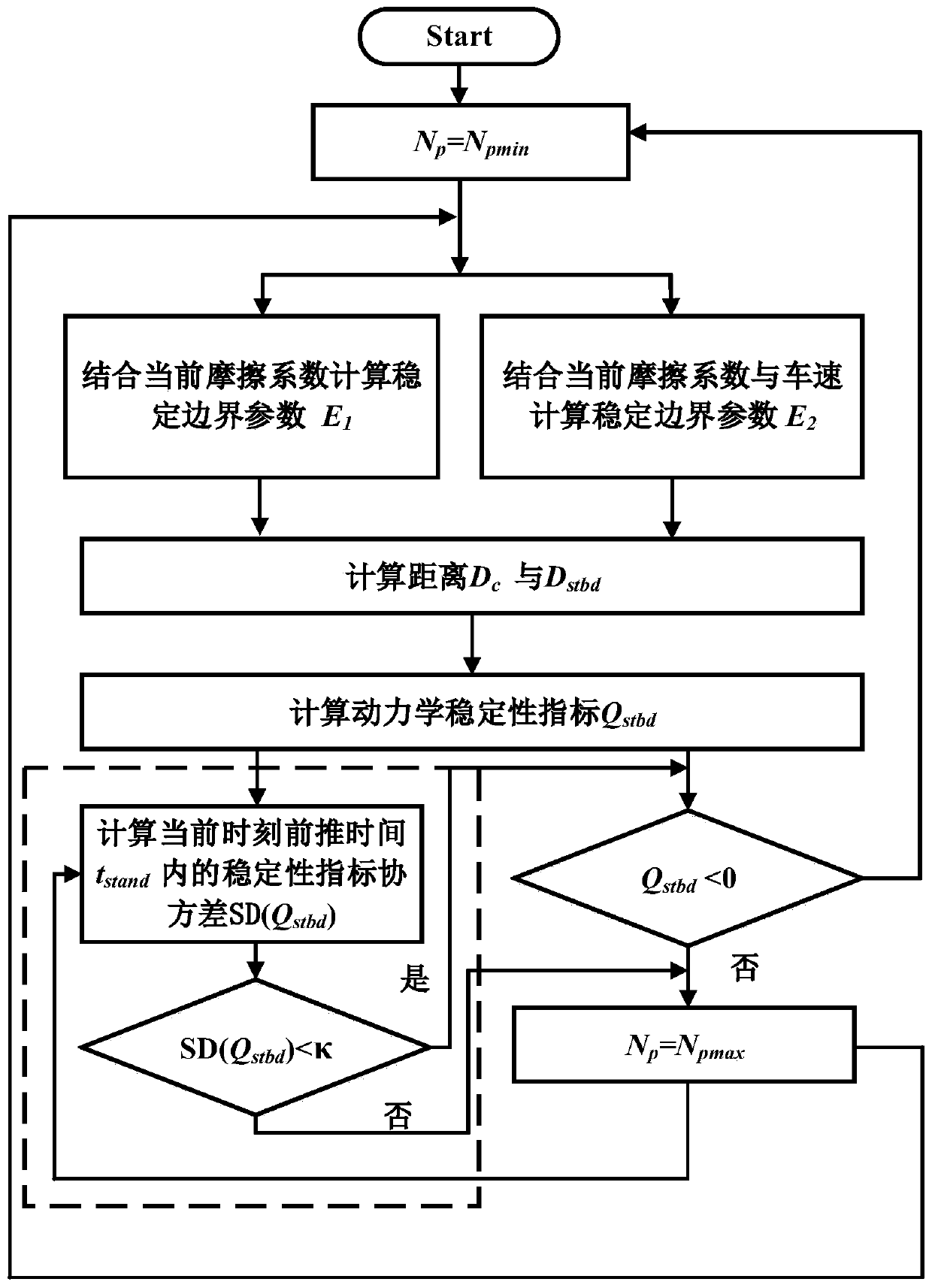
[0093] Step 3. Calculate the dynamic stability index value Q at the current moment according to the current vehicle state stbd (k), combined with the influence of the prediction domain length on vehicle tracking accuracy and vehicle dynamics stability, online adjustment of the current m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More