

A micro hydraulic servo control system and control method for an exoskeleton robot
An exoskeleton robot, hydraulic servo technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of restricting exoskeleton robots, exoskeleton systems being cumbersome, and inconvenient to use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
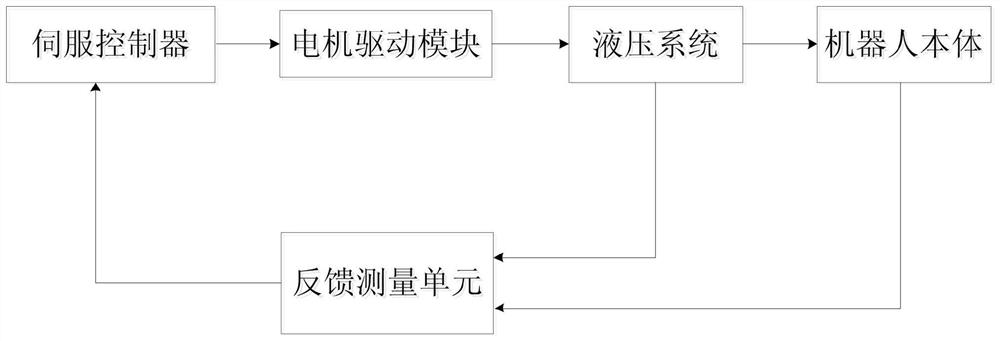
[0054] A micro hydraulic servo control system for an exoskeleton robot, such as figure 1 As shown, it includes a servo controller, a motor drive module, a micro-hydraulic system, a robot body and a feedback measurement unit; the output end of the servo controller is connected to the motor drive module for solving the control algorithm and outputting control signals to the motor drive module; the output end of the motor drive module is connected to the micro hydraulic system for driving the hydraulic pump drive motor and the rotary reversing valve drive motor; the output end of the micro hydraulic system is connected to the micro hydraulic system on the robot body The hip joint and the knee joint are connected to drive the joint action of the exoskeleton robot; the micro hydraulic system is also connected to the servo controller through the feedback...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More